Re: Часы с календарем
ЧАсы минуты дата месяц все на своих местах
Вы не вошли. Пожалуйста, войдите или зарегистрируйтесь.
forum.rcl-radio.ru → Новые идеи для проектов Arduino → Часы с календарем
Страницы Назад 1 … 9 10 11 12 13 … 17 Далее
Чтобы отправить ответ, вы должны войти или зарегистрироваться
ЧАсы минуты дата месяц все на своих местах
ЧАсы минуты дата месяц все на своих местах
на маленьком 1 горят Q2 и Q4 без точек.Возможно надо корректировать время-дата
Время 21:54
Дата 3
Месяц 9
Все верно?
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
DS3231 clock;RTCDateTime DateTime;
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an, dp1,dp2;
int old_sec,dp;
int hour,minut,secon,data,mon,year,den,temp;
void setup() {
Wire.begin();
clock.begin();
clock.setDateTime(2023, 9, 3, 21, 54, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
data = DateTime.day;mon = DateTime.month;year = DateTime.year;
den=DateTime.dayOfWeek;
if(hour/10%10==0){a[0]=10;}else{a[0]=hour/10%10;}
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;}
a[5]=data%10;
if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;}
a[7]=mon%10;
if(millis()-times<500){dp=1;}else{dp=0;}
if(old_sec!=secon){old_sec=secon;times=millis();}
delay(100);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
/// SMALL
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 1; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 2; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 3; anod();break;
/// BIG
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 5; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 6; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}Как работают маленькие индикаторы? когда выводить дату и месяц, год, температуру. Как должны работать точки?
Время 21:54
Дата 3
Месяц 9Все верно?
// 19 === SCL // 20 === SDA //// Катоды #define SEG_A 28 #define SEG_B 29 #define SEG_C 30 #define SEG_D 31 #define SEG_E 23 #define SEG_F 22 #define SEG_G 21 #define SEG_DP 20 //// Аноды #define AN_Q1 3 #define AN_Q2 2 #define AN_Q3 1 #define AN_Q4 0 #define AN_Q5 24 #define AN_Q6 25 #define AN_Q7 26 #define AN_Q8 27 #include <Wire.h> #include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip DS3231 clock;RTCDateTime DateTime; long oldPosition = -999, newPosition, times; int a[8],segm,i,an, dp1,dp2; int old_sec,dp; int hour,minut,secon,data,mon,year,den,temp; void setup() { Wire.begin(); clock.begin(); clock.setDateTime(2023, 9, 3, 21, 54, 0); cli(); TCCR1A = 0; TCCR1B = 0; TCNT1 = 0; // (8000000/((300+1)x64))=415.28239202658 Hz OCR1A = 300; TCCR1B |= (1 << WGM12); // Prescaler 64 TCCR1B |= (1 << CS11) | (1 << CS10); TIMSK |= (1 << OCIE1A); sei(); pinMode(SEG_A, OUTPUT); pinMode(SEG_B, OUTPUT); pinMode(SEG_C, OUTPUT); pinMode(SEG_D, OUTPUT); pinMode(SEG_E, OUTPUT); pinMode(SEG_F, OUTPUT); pinMode(SEG_G, OUTPUT); pinMode(SEG_DP, OUTPUT); pinMode(AN_Q1, OUTPUT); pinMode(AN_Q2, OUTPUT); pinMode(AN_Q3, OUTPUT); pinMode(AN_Q4, OUTPUT); pinMode(AN_Q5, OUTPUT); pinMode(AN_Q6, OUTPUT); pinMode(AN_Q7, OUTPUT); pinMode(AN_Q8, OUTPUT); // pinMode (EXIT,INPUT_PULLUP); } void loop() { DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second; data = DateTime.day;mon = DateTime.month;year = DateTime.year; den=DateTime.dayOfWeek; if(hour/10%10==0){a[0]=10;}else{a[0]=hour/10%10;} a[1]=hour%10; a[2]=minut/10%10; a[3]=minut%10; if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;} a[5]=data%10; if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;} a[7]=mon%10; if(millis()-times<500){dp=1;}else{dp=0;} if(old_sec!=secon){old_sec=secon;times=millis();} delay(100); } ISR(TIMER1_COMPA_vect){ switch (i) { /// SMALL // Q5 case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 0; anod();break; // Q6 case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 1; anod();break; // Q7 case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 2; anod();break; // Q8 case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 3; anod();break; /// BIG // Q1 case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 4; anod();break; // Q2 case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 5; anod();break; // Q3 case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 6; anod();break; // Q4 case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 7; anod();break; } i++;if (i > 7) {i = 0;} } void segment() { switch (segm) { // A B C D E F G case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0 case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1 case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2 case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3 case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4 case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5 case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6 case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7 case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8 case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9 case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто } } void anod() { switch (an) { case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break; case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break; case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; } } void ch(int pin, int logic) { digitalWrite(pin, logic); }
Все верно
Как работают маленькие индикаторы? когда выводить дату и месяц, год, температуру. Как должны работать точки?
Год думаю не нужно выводить,только при настройке его настраивать.По точкам даты пока не ясно,это когда уже полностью соберу часы,возможно точка будет Q2 как разделитель дата-месяц.
хорошо, как соберете, напишите.
До завтра тогда,после работы продолжим
Разделитель дата-месяц все равно нужен
Разделитель дата-месяц все равно нужен
Хорошо - поставлю точку между датой и месяцем, завтра допишу скетч
Вывод температуры Вам нужен с минусом?
Вывод температуры - формат
Примеры:
23,5*С
_1,5*С
-4,1*С
-21*С
Здравствуйте. Готов тестированию
Здравствуйте.
Тестирование датчика температуры
Формат
23,5*С
_1,5*С
-4,1*С
-21*С
с 5 по 10 и с 25 по 30 и 45 по 50 сек показывает дата месяц
все остальное время температуру
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
#include <OneWire.h> // http://rcl-radio.ru/wp-content/uploads/2018/07/OneWire.zip
DS3231 clock;RTCDateTime DateTime;
OneWire ds(4); // Вход датчика 18b20 (PD4 44 пин контр)
long oldPosition = -999, newPosition, times,times1,times2;
int a[8],segm,i,an, dp1,dp2;
int old_sec,dp,dp_grad,dp_l;
int hour,minut,secon,data,mon,year,den;
int temp;
void setup() {
Wire.begin();
clock.begin();
// clock.setDateTime(2023, 8, 26, 20, 40, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
data = DateTime.day;mon = DateTime.month;year = DateTime.year;
den=DateTime.dayOfWeek;
if(millis()-times1>10){temp=dsRead(0)*10;times1=millis();}
if(hour/10%10==0){a[0]=10;}else{a[0]=hour/10%10;}
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
if( (secon>=5&&secon<=10) || (secon>=25&&secon<=30) || (secon>=45&&secon<50)){ dp_grad=1;dp_l=0;
if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;}
a[5]=data%10;
if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;}
a[7]=mon%10;
}
else{
dp_grad=0;
if(temp>=0&&temp<100){dp_l=0;a[4]=10;a[5]=temp/10%10;a[6]=temp%10;a[7]=11; } // _1.3C
if(temp>=100){dp_l=0;a[4]=temp/100%10;a[5]=temp/10%10;a[6]=temp%10;a[7]=11; } // 23.5C
if(temp<0&&temp>-100){dp_l=0;a[4]=12;a[5]=abs(temp/10%10);a[6]=abs(temp%10);a[7]=11; } // -1.3C
if(temp<=-100){dp_l=1;a[4]=12;a[5]=abs(temp/100%10);a[6]=abs(temp/10%10);a[7]=11; } // -23C
}
if(millis()-times<500){dp=1;}else{dp=0;}
if(old_sec!=secon){old_sec=secon;times=millis();}
delay(100);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
/// SMALL
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,dp_l); segment(); an = 1; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 2; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,dp_grad); segment(); an = 3; anod();break;
/// BIG
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 5; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 6; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
case 11: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // C
case 12: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // -
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}
float dsRead(byte x) {
byte data[2], addr[8][8], kol = 0;
while (ds.search(addr[kol])) { // поиск датчиков, определение адреса и кол-ва датчиков
kol++;
}
ds.reset_search(); // Сброс поиска датчика
ds.reset(); // Инициализация, выполняется сброс шины
ds.select(addr[x]); // Обращение к датчику по адресу
ds.write(0x44, 0); // Измерение температуры с переносом данных в память
ds.reset(); // Инициализация, выполняется сброс шины
ds.select(addr[x]); // Обращение к датчику по адресу
ds.write(0xBE); // Обращение памяти
data[0] = ds.read();// Чтение памяти byte low
data[1] = ds.read();// Чтение памяти byte high
float value = ((data[1] << 8) | data[0]) / 16.0; return (float)value; // Расчет температуры и вывод
}При включении ВРЕМЯ-ТЕМПЕРАТУРА 24.5*С,затем ВРЕМЯ-ДАТА,снова ВРЕМЯ-ТЕМПЕРАТУРА 24.5С без точки в 4 разряде. Теряется точка в знаке *С
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
#include <OneWire.h> // http://rcl-radio.ru/wp-content/uploads/2018/07/OneWire.zip
DS3231 clock;RTCDateTime DateTime;
OneWire ds(4); // Вход датчика 18b20 (PD4 44 пин контр)
long oldPosition = -999, newPosition, times,times1,times2;
int a[8],segm,i,an, dp1,dp2;
int old_sec,dp,dp_l;
int hour,minut,secon,data,mon,year,den;
int temp;
void setup() {
Wire.begin();
clock.begin();
// clock.setDateTime(2023, 8, 26, 20, 40, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
data = DateTime.day;mon = DateTime.month;year = DateTime.year;
den=DateTime.dayOfWeek;
if(millis()-times1>10){temp=dsRead(0)*10;times1=millis();}
if(hour/10%10==0){a[0]=10;}else{a[0]=hour/10%10;}
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
if( (secon>=5&&secon<=10) || (secon>=25&&secon<=30) || (secon>=45&&secon<50)){ dp_l=0;
if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;}
a[5]=data%10;
if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;}
a[7]=mon%10;
}
else{
if(temp>=0&&temp<100){dp_l=0;a[4]=10;a[5]=temp/10%10;a[6]=temp%10;a[7]=11; } // _1.3C
if(temp>=100){dp_l=0;a[4]=temp/100%10;a[5]=temp/10%10;a[6]=temp%10;a[7]=11; } // 23.5C
if(temp<0&&temp>-100){dp_l=0;a[4]=12;a[5]=abs(temp/10%10);a[6]=abs(temp%10);a[7]=11; } // -1.3C
if(temp<=-100){dp_l=1;a[4]=12;a[5]=abs(temp/100%10);a[6]=abs(temp/10%10);a[7]=11; } // -23C
}
if(millis()-times<500){dp=1;}else{dp=0;}
if(old_sec!=secon){old_sec=secon;times=millis();}
delay(100);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
/// SMALL
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,dp_l); segment(); an = 1; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 2; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7]; segment(); an = 3; anod();break;
/// BIG
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 5; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 6; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
case 11: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1);ch(SEG_DP, 0); break; // *C
case 12: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // -
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}
float dsRead(byte x) {
byte data[2], addr[8][8], kol = 0;
while (ds.search(addr[kol])) { // поиск датчиков, определение адреса и кол-ва датчиков
kol++;
}
ds.reset_search(); // Сброс поиска датчика
ds.reset(); // Инициализация, выполняется сброс шины
ds.select(addr[x]); // Обращение к датчику по адресу
ds.write(0x44, 0); // Измерение температуры с переносом данных в память
ds.reset(); // Инициализация, выполняется сброс шины
ds.select(addr[x]); // Обращение к датчику по адресу
ds.write(0xBE); // Обращение памяти
data[0] = ds.read();// Чтение памяти byte low
data[1] = ds.read();// Чтение памяти byte high
float value = ((data[1] << 8) | data[0]) / 16.0; return (float)value; // Расчет температуры и вывод
}Теперь все правильно
Протестируйте на разных температурах отображение
найдите строку
if(millis()-times1>10){temp=dsRead(0)*10;times1=millis();}
после нее добавьте
temp=-230 ; // это 23 гр
далее значение поменяйте на
-12
12
-284
должно показать
23,0
-1,2
1,2
-28
Все получилось
Вот думаю как расположить цифры


Мне кажется первый вариант лучше
Мне кажется первый вариант лучше
Я тоже об этом подумал, равномерно распределяется по корпусу
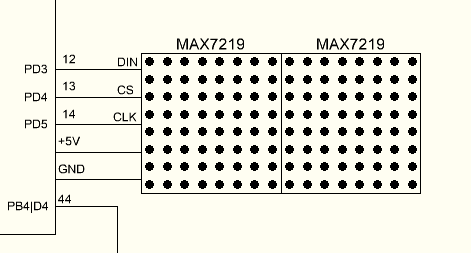
Тест MAX7219 должна гореть буква В в первой матрице, во второй пусто
// 19 === SCL
// 20 === SDA
#define DIN PD3
#define CS PD4
#define CLK PD5
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
#include <OneWire.h> // http://rcl-radio.ru/wp-content/uploads/2018/07/OneWire.zip
DS3231 clock;RTCDateTime DateTime;
OneWire ds(4); // Вход датчика 18b20 (PD4 44 пин контр)
long oldPosition = -999, newPosition, times,times1,times2;
int a[8],segm,i,an, dp1,dp2;
int old_sec,dp,dp_l;
int hour,minut,secon,data,mon,year,den;
int temp;
void setup() {
Wire.begin();
clock.begin();
DDRD |= (1 << DIN) | (1 << CS) | (1 << CLK);
max7219(0x0F, 0, 0);// тест выкл.
max7219(0x0C, 1, 1);// вкл. индик.
max7219(0x0A, 1, 1);// яркость
max7219(0x09, 0, 0);// дешифраторы выкл.
max7219(0x0B, 7, 7);// кол-во разрядов
// clock.setDateTime(2023, 8, 26, 20, 40, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
data = DateTime.day;mon = DateTime.month;year = DateTime.year;
den=DateTime.dayOfWeek;
if(millis()-times1>10){temp=dsRead(0)*10;times1=millis();}
max7219(1, 0x7c, 0x00);max7219(2, 0x66, 0x00);max7219(3, 0x66, 0x00);max7219(4, 0x7c, 0x00);max7219(5, 0x66, 0x00);
max7219(6, 0x66, 0x00);max7219(7, 0x7c, 0x00);max7219(8, 0x00, 0x00);// B
if(hour/10%10==0){a[0]=10;}else{a[0]=hour/10%10;}
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
if( (secon>=5&&secon<=10) || (secon>=25&&secon<=30) || (secon>=45&&secon<50)){ dp_l=0;
if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;}
a[5]=data%10;
if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;}
a[7]=mon%10;
}
else{
if(temp>=0&&temp<100){dp_l=0;a[4]=10;a[5]=temp/10%10;a[6]=temp%10;a[7]=11; } // _1.3C
if(temp>=100){dp_l=0;a[4]=temp/100%10;a[5]=temp/10%10;a[6]=temp%10;a[7]=11; } // 23.5C
if(temp<0&&temp>-100){dp_l=0;a[4]=12;a[5]=abs(temp/10%10);a[6]=abs(temp%10);a[7]=11; } // -1.3C
if(temp<=-100){dp_l=1;a[4]=12;a[5]=abs(temp/100%10);a[6]=abs(temp/10%10);a[7]=11; } // -23C
}
if(millis()-times<500){dp=1;}else{dp=0;}
if(old_sec!=secon){old_sec=secon;times=millis();}
delay(100);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
/// SMALL
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,dp_l); segment(); an = 1; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 2; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7]; segment(); an = 3; anod();break;
/// BIG
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 5; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 6; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
case 11: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1);ch(SEG_DP, 0); break; // *C
case 12: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // -
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}
float dsRead(byte x) {
byte data[2], addr[8][8], kol = 0;
while (ds.search(addr[kol])) { // поиск датчиков, определение адреса и кол-ва датчиков
kol++;
}
ds.reset_search(); // Сброс поиска датчика
ds.reset(); // Инициализация, выполняется сброс шины
ds.select(addr[x]); // Обращение к датчику по адресу
ds.write(0x44, 0); // Измерение температуры с переносом данных в память
ds.reset(); // Инициализация, выполняется сброс шины
ds.select(addr[x]); // Обращение к датчику по адресу
ds.write(0xBE); // Обращение памяти
data[0] = ds.read();// Чтение памяти byte low
data[1] = ds.read();// Чтение памяти byte high
float value = ((data[1] << 8) | data[0]) / 16.0; return (float)value; // Расчет температуры и вывод
}
void max7219(byte reg_n, byte h1, byte h2){
PORTD &=~(1 << CS);WriteBit16(reg_n,h1);WriteBit16(reg_n,h2);PORTD |=(1 << CS);
}
void WriteBit16(byte reg, byte data){
for(char i = 7; i >= 0; i--){
PORTD &= ~(1 << CLK);
if(((reg >> i) & 1) == 1){PORTD |= (1 << DIN);}else{PORTD &= ~(1 << DIN);}
PORTD |=(1 << CLK);}
for(char i = 7; i >= 0; i--){
PORTD &= ~(1 << CLK);
if(((data >> i) & 1) == 1){PORTD |= (1 << DIN);}else{PORTD &= ~(1 << DIN);}
PORTD |=(1 << CLK);}
PORTD &= ~(1 << CLK);PORTD |= (1 << DIN);
}
void cl(){for(char i=1;i<=8;i++){max7219(i, 0, 0);}}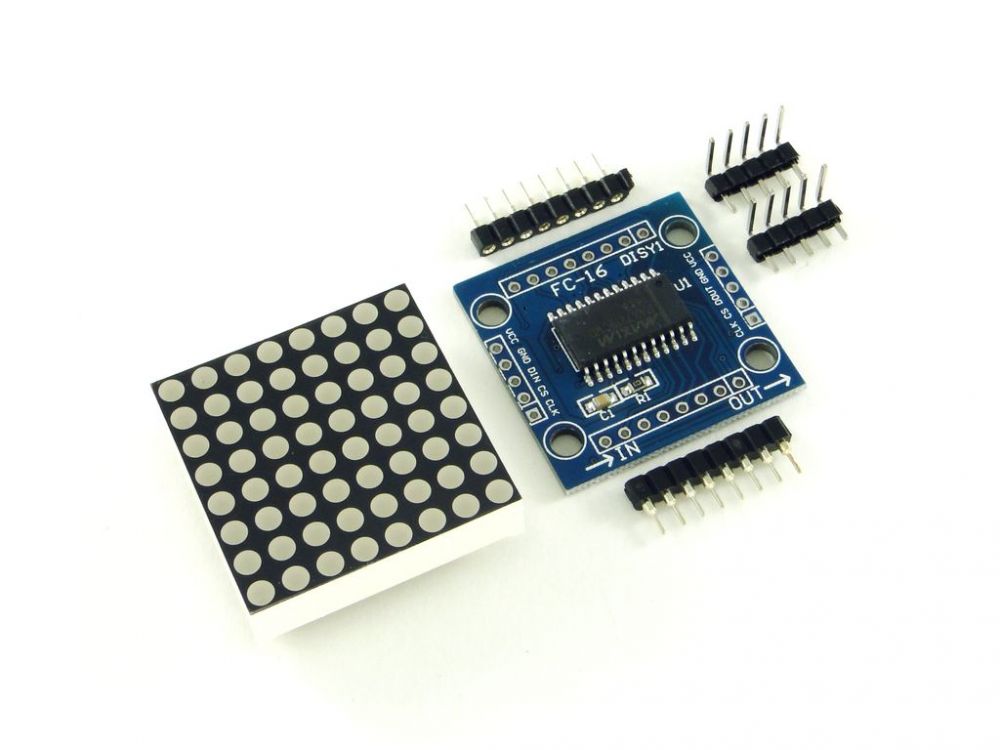
У меня такой модуль. Горит В верх ногами во второй матрице
Можно повернуть?
Можно повернуть?
Физически то да
Страницы Назад 1 … 9 10 11 12 13 … 17 Далее
Чтобы отправить ответ, вы должны войти или зарегистрироваться
forum.rcl-radio.ru → Новые идеи для проектов Arduino → Часы с календарем
Форум работает на PunBB, при поддержке Informer Technologies, Inc
|
|