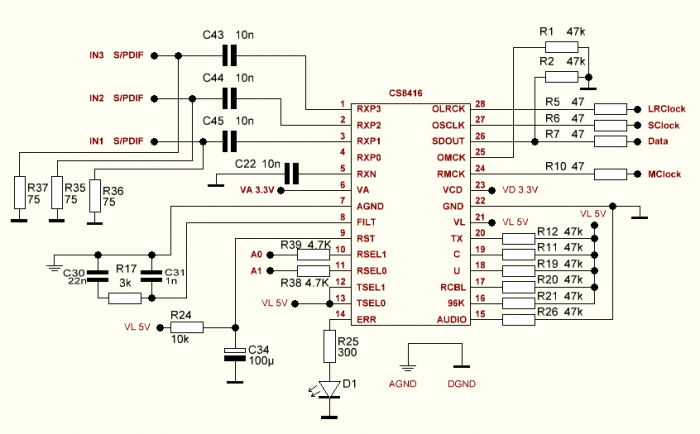
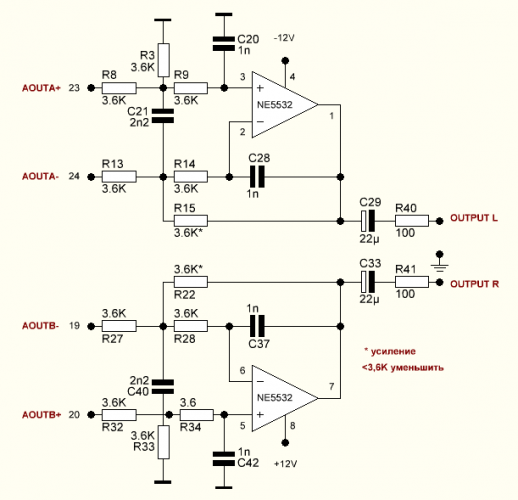
Тема: CS8416 + CS4398
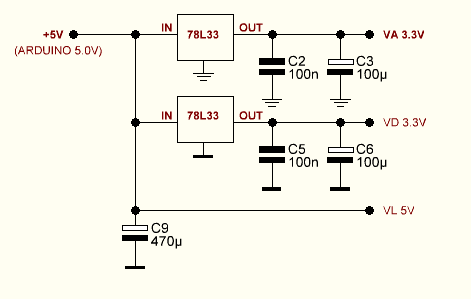
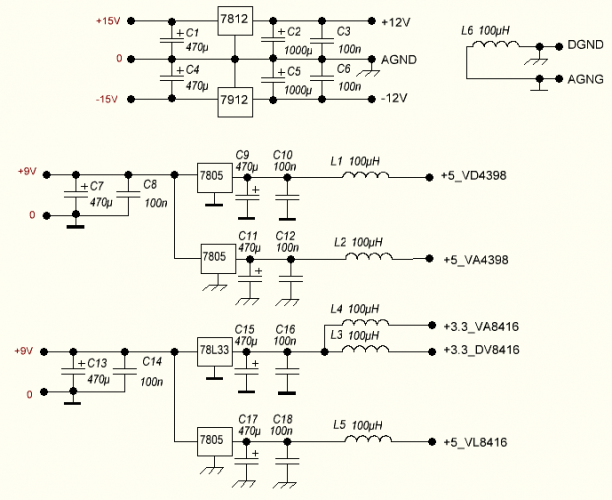
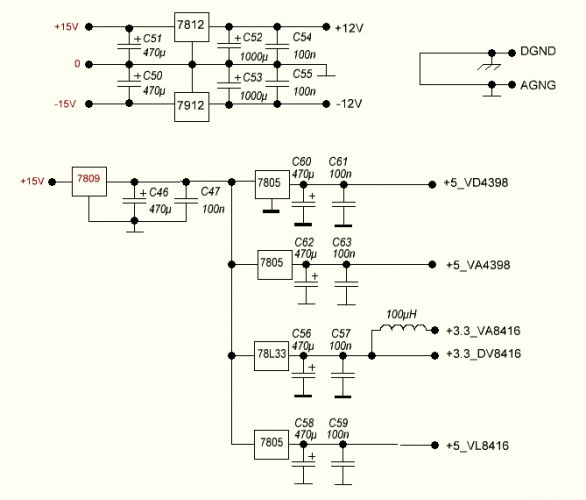
Упрощенная схема питания
#include <Wire.h>
#include <EEPROM.h>
#include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip
#include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip
#include <LiquidCrystal_I2C.h> //Библиотека - http://forum.rcl-radio.ru/misc.php?action=pan_download&item=45&download=1
LiquidCrystal_I2C lcd(0x27,16,2); // Устанавливаем дисплей
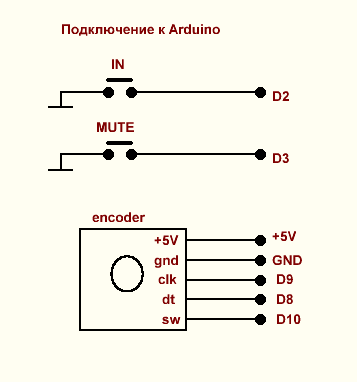
Encoder myEnc(9, 8);//CLK, DT
byte v1[8] = {7,7,7,7,7,7,7,7};
byte v2[8] = {7,7,0, 0, 0, 0, 0, 0};
byte v3[8] = { 0, 0, 0, 0, 0,0,31,31};
byte v4[8] = {31,31, 0, 0, 0, 0,31,31};
byte v5[8] = { 28, 28, 0, 0, 0, 0, 28, 28};//
byte v6[8] = {28,28,28,28,28,28,28,28};
byte v7[8] = { 0, 0, 0, 0, 0, 0,7,7};
byte v8[8] = { 31, 31,0,0,0,0,0, 0};
int a[3];
byte i,d1,d2,d3,d4,d5,d6,e1,e2,e3;
unsigned long time,oldPosition = -999,newPosition;
int vol,vol_d;
bool w,mute;
void setup() {
Wire.begin();
lcd.init();lcd.backlight();
pinMode(10,INPUT);
lcd.createChar(1, v1);lcd.createChar(2, v2);lcd.createChar(3, v3);
lcd.createChar(4, v4);lcd.createChar(5, v5);lcd.createChar(6, v6);
lcd.createChar(7, v7);lcd.createChar(8, v8);
Serial.begin(9600);
lcd.setCursor(0,0);lcd.print(" CS4398 ");
lcd.setCursor(0,1);lcd.print(" CS8416 ");
MsTimer2::set(1, to_Timer);MsTimer2::start();
delay(1000);
vol = EEPROM.read(0);
wireWrite(0x4C, 0x02, 0b00011010);// I2S 24 bit / 48 kHz / 100...200 kHz
wireWrite(0x4C, 0x03, 0b00001001);// default
wireWrite(0x4C, 0x04, 0b11000000);// default
wireWrite(0x4C, 0x05, vol);
wireWrite(0x4C, 0x06, vol);
wireWrite(0x4C, 0x07, 0b10110000);// default
wireWrite(0x4C, 0x08, 0b01000000);// default
wireWrite(0x4C, 0x09, 0b00001000);// default
Serial.print("Chip ID 0");
Serial.println(wireRead(0x4C, 0x01),BIN);
lcd.clear();
}
void loop() {
if(digitalRead(10)==LOW && mute==0){mute=1;wireWrite(0x4C, 0x04, 0b11011000);delay(300);}
if(digitalRead(10)==LOW && mute==1){mute=0;wireWrite(0x4C, 0x04, 0b11000000);delay(300);}
if(mute==1){lcd.setCursor(0,1);lcd.print("MUTE");}else{lcd.setCursor(0,1);lcd.print("192k");}
if (newPosition != oldPosition){oldPosition = newPosition;
vol=vol+newPosition;myEnc.write(0);newPosition=0;time=millis();w=1;
if(vol<0){vol=0;}if(vol>130){vol=130;}
wireWrite(0x4C, 0x05, vol);
wireWrite(0x4C, 0x06, vol);
lcd.setCursor(0,0);lcd.print("VOLUME ");
}
vol_d=130-vol;
a[0]=vol_d/100;
a[1]=vol_d/10%10;
a[2]=vol_d%10;
for(i=0;i<3;i++){
switch(i){
case 0: e1=7,e2=8,e3=9;break;
case 1: e1=10,e2=11,e3=12;break;
case 2: e1=13,e2=14,e3=15;break;
}
switch(a[i]){
case 0: d1=1,d2=8,d3=6,d4=1,d5=3,d6=6;break;
case 1: d1=32,d2=2,d3=6,d4=32,d5=32,d6=6;break;
case 2: d1=2,d2=8,d3=6,d4=1,d5=4,d6=5;break;
case 3: d1=2,d2=4,d3=6,d4=7,d5=3,d6=6;break;
case 4: d1=1,d2=3,d3=6,d4=32,d5=32,d6=6;break;
case 5: d1=1,d2=4,d3=5,d4=7,d5=3,d6=6;break;
case 6: d1=1,d2=4,d3=5,d4=1,d5=3,d6=6;break;
case 7: d1=1,d2=8,d3=6,d4=32,d5=32,d6=6;break;
case 8: d1=1,d2=4,d3=6,d4=1,d5=3,d6=6;break;
case 9: d1=1,d2=4,d3=6,d4=7,d5=3,d6=6;break;
}
lcd.setCursor(e1,0);lcd.write((uint8_t)d1);lcd.setCursor(e2,0);lcd.write((uint8_t)d2);lcd.setCursor(e3,0);lcd.write((uint8_t)d3);
lcd.setCursor(e1,1);lcd.write((uint8_t)d4);lcd.setCursor(e2,1);lcd.write((uint8_t)d5);lcd.setCursor(e3,1);lcd.write((uint8_t)d6);
}
delay(20);if(millis()-time>5000 && w==1){w=0;EEPROM.write(0,vol);}
}// loop
void wireWrite(byte addr, byte reg, byte data){
Wire.beginTransmission(addr);
Wire.write (reg);
Wire.write (data);
Wire.endTransmission();
}
byte wireRead(int addr, int reg){
Wire.beginTransmission(addr);
Wire.write (reg);
Wire.endTransmission();
Wire.requestFrom(addr,1);
while(Wire.available()<1);
byte value = Wire.read();
return value;
}
void to_Timer(){newPosition = myEnc.read()/4;}