Re: Часы на игп-17 (разработка)
Проверил, показания с датчика считываются и отображаются верно. Но опять начал мерцать индикатор
Вы не вошли. Пожалуйста, войдите или зарегистрируйтесь.
forum.rcl-radio.ru → Тестирование скетчей → Часы на игп-17 (разработка)
Проверил, показания с датчика считываются и отображаются верно. Но опять начал мерцать индикатор
Скорость i2c надо понизить
#define SCL_F 400000 // // I2C Speed
замените на
#define SCL_F 100000 // // I2C Speed
Заменил. Не помогло...
// ATMEGA8535 16 MHZ
#define ADDR 0x68
#define CPU_F 16000000 // Clock Speed
#define SCL_F 400000 // // I2C Speed
#define TEMP_KORR 0 // гр.Цельсия
#include <avr/io.h>
#include <util/delay.h>
byte a[16],an,segm,i;
bool w=1,w1;
byte sec,min_,hour,datat,mont,year;
int temper,sett,times;
int set_hour,set_min,set_sec,set_datat,set_mont,set_year;
int uuu;
void setup() {
DDRA = 0xFF;
DDRB = 0xFF;
DDRC = 0xFF;
DDRD |= (1 << PD6)|(1 << PD7);
PORTD |= (1 << PD2)|(1 << PD3)|(1 << PD4);
TWBR = (((CPU_F)/(SCL_F)-16 )/2) ;
TWSR = 0;
DDRD |= (1 << PD5); // PWM +180V TIMER_1
cli();
// TIMER_2 F = 16000000/128/100=1250 Hz (800 uS)
OCR2 = 100;
TCCR2 |= (1 << WGM21);
TCCR2 |= (1 << CS22) | (1 << CS20);
TIMSK |= (1 << OCIE2);
// TIMER_1 F = 16000000/1024/1/1=15625 Hz
TCCR1A |= (1 << COM1A1);
TCCR1B |= (1 << WGM12);
TCCR1A |= (1 << WGM11) | (1 << WGM10);
TCCR1B |= (1 << CS10);
ICR1 = 1023;
OCR1A = 350;
sei();
// set_time(22,2,2,4,22,23,0);// год 00-99, ДН 1-7 (1=ВС), месяц 1-12, дата 1-31, час 0-23, минуты 0-59, секунды 0-59
i2c_write(0x48,0x01,0);
_delay_ms(200);
}
void loop() {
if(uuu==0){
datat = ((i2c_read(ADDR,4) & 0x0F) + ((i2c_read(ADDR,4) & 0x70) >> 4) * 10);
mont = ((i2c_read(ADDR,5) & 0x0F) + ((i2c_read(ADDR,5) & 0x70) >> 4) * 10);
year = ((i2c_read(ADDR,6) & 0x0F) + ((i2c_read(ADDR,6) & 0x70) >> 4) * 10);
hour = (i2c_read(ADDR,2) & 0x0F) + (((i2c_read(ADDR,2) & 0x70) >> 4) * 10);
min_ = (i2c_read(ADDR,1) & 0x0F) + (((i2c_read(ADDR,1) & 0x70) >> 4) * 10);
if(sec==10||sec==40) {temper = i2c_read_i2c_2bit(0x48,0)-TEMP_KORR ;}
}
uuu++;if(uuu>100){uuu=0;}
sec = (i2c_read(ADDR,0) & 0x0F) + (((i2c_read(ADDR,0) & 0x70) >> 4) * 10);
set_year = year;set_mont = mont;set_datat = datat;set_hour = hour;set_min = min_;set_sec = sec;
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/// BUTTON /////////////
if(((PIND >> PD2) & 1) == 0){sett++;times=0;if(sett>6){sett=0;}wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==1){set_hour++;w1=1; if(set_hour>23){set_hour=23;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==1){set_hour--;w1=1; if(set_hour<0){set_hour=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==2){set_min++;w1=1; if(set_mont>59){set_min=59;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==2){set_min--;w1=1; if(set_mont<0){set_min=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==3){set_sec=0;w1=1; set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==3){set_sec=0;w1=1; set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==4){set_datat++;w1=1; if(set_datat>31){set_datat=31;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==4){set_datat--;w1=1; if(set_datat<0){set_datat=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==5){set_mont++;w1=1; if(set_mont>12){set_mont=12;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==5){set_mont--;w1=1; if(set_mont<0){set_mont=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==6){set_year++;w1=1; if(set_year>50){set_year=50;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==6){set_year--;w1=1; if(set_year<22){set_year=22;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(sett==0){
if(min_==30&&sec<10){a[0]=sec%10+20;a[1]=sec%10+20;a[2]=sec%10+20;a[3]=sec%10+20;a[4]=sec%10+20;a[5]=sec%10+20;a[6]=sec%10+20;a[7]=sec%10+20;
a[8]=sec%10+20;a[9]=sec%10+20;a[10]=sec%10+20;a[11]=sec%10+20;a[12]=sec%10+20;a[13]=sec%10+20;a[14]=sec%10+20;a[15]=sec%10+20;}
else{
if((sec>=10&&sec<=20)||(sec>=40&&sec<=50)){
a[0]=14;
a[1]=13;
a[2]=temper%10;
a[3]=temper/10%10+20;
a[4]=temper/100;
a[5]=10;
a[6]=12;
}
else{
a[0]=10;
a[1]=year%10;
a[2]=year/10;
a[3]=mont%10+20;
a[4]=mont/10;
a[5]=datat%10+20;
a[6]=datat/10;
}
a[7]=10;
a[8]=sec%10;
a[9]=sec/10;
a[10]=11;
a[11]=min_%10;
a[12]=min_/10;
a[13]=11;
a[14]=hour%10;
a[15]=hour/10;
}
}// sett=0
if(sett>0){
a[0]=10;
if(sett==6){if(times<=500||w1==1){w1=0;a[1]=year%10+20;a[2]=year/10;}else{a[1]=11;a[2]=11;}}
if(sett==5){if(times<=500||w1==1){w1=0;a[3]=mont%10+20;a[4]=mont/10;}else{a[3]=11;a[4]=11;}}
if(sett==4){if(times<=500||w1==1){w1=0;a[5]=datat%10+20;a[6]=datat/10;}else{a[5]=11;a[6]=11;}}
a[7]=10;
if(sett==3){if(times<=500||w1==1){w1=0;a[8]=sec%10;a[9]=sec/10;}else{a[8]=11;a[9]=11;}}
a[10]=11;
if(sett==2){if(times<=500||w1==1){w1=0;a[11]=min_%10;a[12]=min_/10;}else{a[11]=11;a[12]=11;}}
a[13]=11;
if(sett==1){if(times<=500||w1==1){w1=0;a[14]=hour%10;a[15]=hour/10;}else{a[14]=11;a[15]=11;}}
if(sett!=3){a[8]=sec%10;a[9]=sec/10;}
}// sett>0
if(sett==0){_delay_ms(100);}
}
void wr(){a[0]=10;a[1]=year%10; a[2]=year/10;a[3]=mont%10+20;a[4]=mont/10;a[5]=datat%10+20;a[6]=datat/10;a[7]=10;a[8]=sec%10;
a[9]=sec/10;a[10]=11;a[11]=min_%10;a[12]=min_/10;a[13]=11;a[14]=hour%10;a[15]=hour/10;}
ISR(TIMER2_COMP_vect){
switch(i){
case 0: segm=a[0]; an=16; anod(); _delay_us(600); segment(); if(a[0]==10)an=16;else an=0; anod(); break;
case 1: segm=a[1]; an=16; anod(); _delay_us(600); segment(); if(a[1]==10)an=16;else an=1; anod(); break;
case 2: segm=a[2]; an=16; anod(); _delay_us(600); segment(); if(a[2]==10)an=16;else an=2; anod(); break;
case 3: segm=a[3]; an=16; anod(); _delay_us(600); segment(); if(a[3]==10)an=16;else an=3; anod(); break;
case 4: segm=a[4]; an=16; anod(); _delay_us(600); segment(); if(a[4]==10)an=16;else an=4; anod(); break;
case 5: segm=a[5]; an=16; anod(); _delay_us(600); segment(); if(a[5]==10)an=16;else an=5; anod(); break;
case 6: segm=a[6]; an=16; anod(); _delay_us(600); segment(); if(a[6]==10)an=16;else an=6; anod(); break;
case 7: segm=a[7]; an=16; anod(); _delay_us(600); segment(); if(a[7]==10)an=16;else an=7; anod(); break;
case 8: segm=a[8]; an=16; anod(); _delay_us(400); segment(); an=8; anod(); break;
case 9: segm=a[9]; an=16; anod(); _delay_us(400); segment(); an=9; anod(); break;
case 10: segm=a[10]; an=16; anod(); _delay_us(400); segment(); an=10; anod(); break;
case 11: segm=a[11]; an=16; anod(); _delay_us(400); segment(); an=11; anod(); break;
case 12: segm=a[12]; an=16; anod(); _delay_us(400); segment(); an=12; anod(); break;
case 13: segm=a[13]; an=16; anod(); _delay_us(400); segment(); an=13; anod(); break;
case 14: segm=a[14]; an=16; anod(); _delay_us(400); segment(); an=14; anod(); break;
case 15: segm=a[15]; an=16; anod(); _delay_us(400); segment(); an=15; anod(); break;
}i++;if(i>15){i=0;}times++;if(times>600){times=0;}}
void segment(){
switch(segm){
// GECDXBFA
case 0: PORTA = 0b01110111;break;
case 1: PORTA = 0b00100100;break;
case 2: PORTA = 0b11010101;break;
case 3: PORTA = 0b10110101;break;
case 4: PORTA = 0b10100110;break;
case 5: PORTA = 0b10110011;break;
case 6: PORTA = 0b11110011;break;
case 7: PORTA = 0b00100101;break;
case 8: PORTA = 0b11110111;break;
case 9: PORTA = 0b10110111;break;
// GECDXBFA
case 20: PORTA = 0b01111111;break;
case 21: PORTA = 0b00101100;break;
case 22: PORTA = 0b11011101;break;
case 23: PORTA = 0b10111101;break;
case 24: PORTA = 0b10101110;break;
case 25: PORTA = 0b10111011;break;
case 26: PORTA = 0b11111011;break;
case 27: PORTA = 0b00101101;break;
case 28: PORTA = 0b11111111;break;
case 29: PORTA = 0b10111111;break;
// GECDXBFA
case 10: PORTA = 0b00000000;break; // пусто
case 11: PORTA = 0b10000000;break; // -
case 12: PORTA = 0b11010010;break; // t
case 13: PORTA = 0b10000111;break; // гр
case 14: PORTA = 0b01010011;break; // C
}}
void anod(){
switch(an){
case 0: PORTC &=~(1<<PC7);PORTB |=(1<<PB0);break;
case 1: PORTB &=~(1<<PB0);PORTB |=(1<<PB1);break;
case 2: PORTB &=~(1<<PB1);PORTB |=(1<<PB2);break;
case 3: PORTB &=~(1<<PB2);PORTB |=(1<<PB3);break;
case 4: PORTB &=~(1<<PB3);PORTB |=(1<<PB4);break;
case 5: PORTB &=~(1<<PB4);PORTB |=(1<<PB5);break;
case 6: PORTB &=~(1<<PB5);PORTB |=(1<<PB6);break;
case 7: PORTB &=~(1<<PB6);PORTB |=(1<<PB7);break;
case 8: PORTB &=~(1<<PB7);PORTD |=(1<<PD6);break;
case 9: PORTD &=~(1<<PD6);PORTD |=(1<<PD7);break;
case 10: PORTD &=~(1<<PD7);PORTC |=(1<<PC2);break;
case 11: PORTC &=~(1<<PC2);PORTC |=(1<<PC3);break;
case 12: PORTC &=~(1<<PC3);PORTC |=(1<<PC4);break;
case 13: PORTC &=~(1<<PC4);PORTC |=(1<<PC5);break;
case 14: PORTC &=~(1<<PC5);PORTC |=(1<<PC6);break;
case 15: PORTC &=~(1<<PC6);PORTC |=(1<<PC7);break;
case 16: PORTB &=~(1<<PB0);PORTB &=~(1<<PB1);PORTB &=~(1<<PB2);PORTB &=~(1<<PB3);PORTB &=~(1<<PB4);PORTB &=~(1<<PB5);PORTB &=~(1<<PB6);PORTB &=~(1<<PB7);
PORTD &=~(1<<PD6);PORTD &=~(1<<PD7);PORTC &=~(1<<PC2);PORTC &=~(1<<PC3);PORTC &=~(1<<PC4);PORTC &=~(1<<PC5);PORTC &=~(1<<PC6);PORTC &=~(1<<PC7);break;
}}
byte i2c_read(byte i2c_addr, byte i2c_reg){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = (i2c_addr << 1) | 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
byte i2c_data = TWDR;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
return i2c_data;
}
int i2c_read_i2c_2bit(byte i2c_addr, byte i2c_reg){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = (i2c_addr << 1) | 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR=(1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while(~TWCR&(1<<TWINT));
int i2c_data0 = TWDR;
TWCR = (1<<TWINT) | (1<<TWEN);
while(~TWCR&(1<<TWINT));
int i2c_data1 = TWDR;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
int i2c_data = (i2c_data0*10)+(i2c_data1>>5)*1.25;
return i2c_data;
}
void i2c_write(byte i2c_addr, byte i2c_reg, byte i2c_dat){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_dat;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
}
void set_time(byte years, byte days, byte monts, byte datas, byte hours ,byte minute, byte second){
if(second < 255){i2c_write(ADDR,0x00,(second/10<<4)+second%10);}
if(minute < 255){i2c_write(ADDR,0x01,(minute/10<<4)+minute%10);}
if(hours < 255){i2c_write(ADDR,0x02,(hours/10<<4)+hours%10);}
if(days < 255){i2c_write(ADDR,0x03,days);}
if(datas < 255){i2c_write(ADDR,0x04,(datas/10<<4)+datas%10);}
if(monts < 255){i2c_write(ADDR,0x05,(monts/10<<4)+monts%10);}
if(years < 255){i2c_write(ADDR,0x06,(years/10<<4)+years%10);}
} Мерцание индикатора осталось. Перестал опрашиваться датчик, отображаются нули
Частота кварца 16 МГц?
Да, кварц 16 МГц, неизменно с начала опытов
if(sec==10||sec==40) {temper = i2c_read_i2c_2bit(0x48,0)-TEMP_KORR ;}
Если закомментировать эту строку мерцание пропадает?
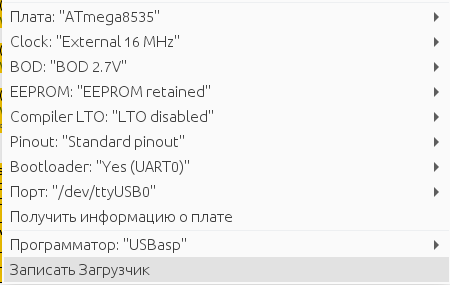
При выборе частоты кварца в 16 МГц нажимали "Записать загрузчик"?
Нет.
Нажмите "Записать загрузчик" и повторите загрузку скетча.
// ATMEGA8535 16 MHZ
#define ADDR 0x68
#define CPU_F 16000000 // Clock Speed
#define SCL_F 400000 // // I2C Speed
#define TEMP_KORR 0 // гр.Цельсия
#include <avr/io.h>
#include <util/delay.h>
byte a[16],an,segm,i;
bool w=1,w1;
byte sec,min_,hour,datat,mont,year;
int temper,sett,times;
int set_hour,set_min,set_sec,set_datat,set_mont,set_year;
void setup() {
DDRA = 0xFF;
DDRB = 0xFF;
DDRC = 0xFF;
DDRD |= (1 << PD6)|(1 << PD7);
PORTD |= (1 << PD2)|(1 << PD3)|(1 << PD4);
TWBR = (((CPU_F)/(SCL_F)-16 )/2) ;
TWSR = 0;
DDRD |= (1 << PD5); // PWM +180V TIMER_1
cli();
// TIMER_2 F = 16000000/128/100=1250 Hz (800 uS)
OCR2 = 100;
TCCR2 |= (1 << WGM21);
TCCR2 |= (1 << CS22) | (1 << CS20);
TIMSK |= (1 << OCIE2);
// TIMER_1 F = 16000000/1024/1/1=15625 Hz
TCCR1A |= (1 << COM1A1);
TCCR1B |= (1 << WGM12);
TCCR1A |= (1 << WGM11) | (1 << WGM10);
TCCR1B |= (1 << CS10);
ICR1 = 1023;
OCR1A = 350;
sei();
// set_time(22,2,2,4,22,23,0);// год 00-99, ДН 1-7 (1=ВС), месяц 1-12, дата 1-31, час 0-23, минуты 0-59, секунды 0-59
i2c_write(0x48,0x01,0);
_delay_ms(200);
}
void loop() {
datat = ((i2c_read(ADDR,4) & 0x0F) + ((i2c_read(ADDR,4) & 0x70) >> 4) * 10);
mont = ((i2c_read(ADDR,5) & 0x0F) + ((i2c_read(ADDR,5) & 0x70) >> 4) * 10);
year = ((i2c_read(ADDR,6) & 0x0F) + ((i2c_read(ADDR,6) & 0x70) >> 4) * 10);
hour = (i2c_read(ADDR,2) & 0x0F) + (((i2c_read(ADDR,2) & 0x70) >> 4) * 10);
min_ = (i2c_read(ADDR,1) & 0x0F) + (((i2c_read(ADDR,1) & 0x70) >> 4) * 10);
if(sec==10||sec==40) {temper = i2c_read_i2c_2bit(0x48,0)-TEMP_KORR ;}
sec = (i2c_read(ADDR,0) & 0x0F) + (((i2c_read(ADDR,0) & 0x70) >> 4) * 10);
set_year = year;set_mont = mont;set_datat = datat;set_hour = hour;set_min = min_;set_sec = sec;
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/// BUTTON /////////////
if(((PIND >> PD2) & 1) == 0){sett++;times=0;if(sett>6){sett=0;}wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==1){set_hour++;w1=1; if(set_hour>23){set_hour=23;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==1){set_hour--;w1=1; if(set_hour<0){set_hour=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==2){set_min++;w1=1; if(set_mont>59){set_min=59;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==2){set_min--;w1=1; if(set_mont<0){set_min=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==3){set_sec=0;w1=1; set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==3){set_sec=0;w1=1; set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==4){set_datat++;w1=1; if(set_datat>31){set_datat=31;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==4){set_datat--;w1=1; if(set_datat<0){set_datat=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==5){set_mont++;w1=1; if(set_mont>12){set_mont=12;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==5){set_mont--;w1=1; if(set_mont<0){set_mont=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==6){set_year++;w1=1; if(set_year>50){set_year=50;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==6){set_year--;w1=1; if(set_year<22){set_year=22;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(sett==0){
if(min_==30&&sec<10){a[0]=sec%10+20;a[1]=sec%10+20;a[2]=sec%10+20;a[3]=sec%10+20;a[4]=sec%10+20;a[5]=sec%10+20;a[6]=sec%10+20;a[7]=sec%10+20;
a[8]=sec%10+20;a[9]=sec%10+20;a[10]=sec%10+20;a[11]=sec%10+20;a[12]=sec%10+20;a[13]=sec%10+20;a[14]=sec%10+20;a[15]=sec%10+20;}
else{
if((sec>=10&&sec<=20)||(sec>=40&&sec<=50)){
a[0]=14;
a[1]=13;
a[2]=temper%10;
a[3]=temper/10%10+20;
a[4]=temper/100;
a[5]=10;
a[6]=12;
}
else{
a[0]=10;
a[1]=year%10;
a[2]=year/10;
a[3]=mont%10+20;
a[4]=mont/10;
a[5]=datat%10+20;
a[6]=datat/10;
}
a[7]=10;
a[8]=sec%10;
a[9]=sec/10;
a[10]=11;
a[11]=min_%10;
a[12]=min_/10;
a[13]=11;
a[14]=hour%10;
a[15]=hour/10;
}
}// sett=0
if(sett>0){
a[0]=10;
if(sett==6){if(times<=500||w1==1){w1=0;a[1]=year%10+20;a[2]=year/10;}else{a[1]=11;a[2]=11;}}
if(sett==5){if(times<=500||w1==1){w1=0;a[3]=mont%10+20;a[4]=mont/10;}else{a[3]=11;a[4]=11;}}
if(sett==4){if(times<=500||w1==1){w1=0;a[5]=datat%10+20;a[6]=datat/10;}else{a[5]=11;a[6]=11;}}
a[7]=10;
if(sett==3){if(times<=500||w1==1){w1=0;a[8]=sec%10;a[9]=sec/10;}else{a[8]=11;a[9]=11;}}
a[10]=11;
if(sett==2){if(times<=500||w1==1){w1=0;a[11]=min_%10;a[12]=min_/10;}else{a[11]=11;a[12]=11;}}
a[13]=11;
if(sett==1){if(times<=500||w1==1){w1=0;a[14]=hour%10;a[15]=hour/10;}else{a[14]=11;a[15]=11;}}
if(sett!=3){a[8]=sec%10;a[9]=sec/10;}
}// sett>0
if(sett==0){_delay_ms(100);}
}
void wr(){a[0]=10;a[1]=year%10; a[2]=year/10;a[3]=mont%10+20;a[4]=mont/10;a[5]=datat%10+20;a[6]=datat/10;a[7]=10;a[8]=sec%10;
a[9]=sec/10;a[10]=11;a[11]=min_%10;a[12]=min_/10;a[13]=11;a[14]=hour%10;a[15]=hour/10;}
ISR(TIMER2_COMP_vect){
switch(i){
case 0: segm=a[0]; an=16; anod(); _delay_us(600); segment(); if(a[0]==10)an=16;else an=0; anod(); break;
case 1: segm=a[1]; an=16; anod(); _delay_us(600); segment(); if(a[1]==10)an=16;else an=1; anod(); break;
case 2: segm=a[2]; an=16; anod(); _delay_us(600); segment(); if(a[2]==10)an=16;else an=2; anod(); break;
case 3: segm=a[3]; an=16; anod(); _delay_us(600); segment(); if(a[3]==10)an=16;else an=3; anod(); break;
case 4: segm=a[4]; an=16; anod(); _delay_us(600); segment(); if(a[4]==10)an=16;else an=4; anod(); break;
case 5: segm=a[5]; an=16; anod(); _delay_us(600); segment(); if(a[5]==10)an=16;else an=5; anod(); break;
case 6: segm=a[6]; an=16; anod(); _delay_us(600); segment(); if(a[6]==10)an=16;else an=6; anod(); break;
case 7: segm=a[7]; an=16; anod(); _delay_us(600); segment(); if(a[7]==10)an=16;else an=7; anod(); break;
case 8: segm=a[8]; an=16; anod(); _delay_us(400); segment(); an=8; anod(); break;
case 9: segm=a[9]; an=16; anod(); _delay_us(400); segment(); an=9; anod(); break;
case 10: segm=a[10]; an=16; anod(); _delay_us(400); segment(); an=10; anod(); break;
case 11: segm=a[11]; an=16; anod(); _delay_us(400); segment(); an=11; anod(); break;
case 12: segm=a[12]; an=16; anod(); _delay_us(400); segment(); an=12; anod(); break;
case 13: segm=a[13]; an=16; anod(); _delay_us(400); segment(); an=13; anod(); break;
case 14: segm=a[14]; an=16; anod(); _delay_us(400); segment(); an=14; anod(); break;
case 15: segm=a[15]; an=16; anod(); _delay_us(400); segment(); an=15; anod(); break;
}i++;if(i>15){i=0;}times++;if(times>600){times=0;}}
void segment(){
switch(segm){
// GECDXBFA
case 0: PORTA = 0b01110111;break;
case 1: PORTA = 0b00100100;break;
case 2: PORTA = 0b11010101;break;
case 3: PORTA = 0b10110101;break;
case 4: PORTA = 0b10100110;break;
case 5: PORTA = 0b10110011;break;
case 6: PORTA = 0b11110011;break;
case 7: PORTA = 0b00100101;break;
case 8: PORTA = 0b11110111;break;
case 9: PORTA = 0b10110111;break;
// GECDXBFA
case 20: PORTA = 0b01111111;break;
case 21: PORTA = 0b00101100;break;
case 22: PORTA = 0b11011101;break;
case 23: PORTA = 0b10111101;break;
case 24: PORTA = 0b10101110;break;
case 25: PORTA = 0b10111011;break;
case 26: PORTA = 0b11111011;break;
case 27: PORTA = 0b00101101;break;
case 28: PORTA = 0b11111111;break;
case 29: PORTA = 0b10111111;break;
// GECDXBFA
case 10: PORTA = 0b00000000;break; // пусто
case 11: PORTA = 0b10000000;break; // -
case 12: PORTA = 0b11010010;break; // t
case 13: PORTA = 0b10000111;break; // гр
case 14: PORTA = 0b01010011;break; // C
}}
void anod(){
switch(an){
case 0: PORTC &=~(1<<PC7);PORTB |=(1<<PB0);break;
case 1: PORTB &=~(1<<PB0);PORTB |=(1<<PB1);break;
case 2: PORTB &=~(1<<PB1);PORTB |=(1<<PB2);break;
case 3: PORTB &=~(1<<PB2);PORTB |=(1<<PB3);break;
case 4: PORTB &=~(1<<PB3);PORTB |=(1<<PB4);break;
case 5: PORTB &=~(1<<PB4);PORTB |=(1<<PB5);break;
case 6: PORTB &=~(1<<PB5);PORTB |=(1<<PB6);break;
case 7: PORTB &=~(1<<PB6);PORTB |=(1<<PB7);break;
case 8: PORTB &=~(1<<PB7);PORTD |=(1<<PD6);break;
case 9: PORTD &=~(1<<PD6);PORTD |=(1<<PD7);break;
case 10: PORTD &=~(1<<PD7);PORTC |=(1<<PC2);break;
case 11: PORTC &=~(1<<PC2);PORTC |=(1<<PC3);break;
case 12: PORTC &=~(1<<PC3);PORTC |=(1<<PC4);break;
case 13: PORTC &=~(1<<PC4);PORTC |=(1<<PC5);break;
case 14: PORTC &=~(1<<PC5);PORTC |=(1<<PC6);break;
case 15: PORTC &=~(1<<PC6);PORTC |=(1<<PC7);break;
case 16: PORTB &=~(1<<PB0);PORTB &=~(1<<PB1);PORTB &=~(1<<PB2);PORTB &=~(1<<PB3);PORTB &=~(1<<PB4);PORTB &=~(1<<PB5);PORTB &=~(1<<PB6);PORTB &=~(1<<PB7);
PORTD &=~(1<<PD6);PORTD &=~(1<<PD7);PORTC &=~(1<<PC2);PORTC &=~(1<<PC3);PORTC &=~(1<<PC4);PORTC &=~(1<<PC5);PORTC &=~(1<<PC6);PORTC &=~(1<<PC7);break;
}}
byte i2c_read(byte i2c_addr, byte i2c_reg){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = (i2c_addr << 1) | 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
byte i2c_data = TWDR;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
return i2c_data;
}
int i2c_read_i2c_2bit(byte i2c_addr, byte i2c_reg){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = (i2c_addr << 1) | 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR=(1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while(~TWCR&(1<<TWINT));
int i2c_data0 = TWDR;
TWCR = (1<<TWINT) | (1<<TWEN);
while(~TWCR&(1<<TWINT));
int i2c_data1 = TWDR;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
int i2c_data = (i2c_data0*10)+(i2c_data1>>5)*1.25;
return i2c_data;
}
void i2c_write(byte i2c_addr, byte i2c_reg, byte i2c_dat){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_dat;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
}
void set_time(byte years, byte days, byte monts, byte datas, byte hours ,byte minute, byte second){
if(second < 255){i2c_write(ADDR,0x00,(second/10<<4)+second%10);}
if(minute < 255){i2c_write(ADDR,0x01,(minute/10<<4)+minute%10);}
if(hours < 255){i2c_write(ADDR,0x02,(hours/10<<4)+hours%10);}
if(days < 255){i2c_write(ADDR,0x03,days);}
if(datas < 255){i2c_write(ADDR,0x04,(datas/10<<4)+datas%10);}
if(monts < 255){i2c_write(ADDR,0x05,(monts/10<<4)+monts%10);}
if(years < 255){i2c_write(ADDR,0x06,(years/10<<4)+years%10);}
} Да, все так и сделал. Температура отображается, но индикатор по прежнему мерцает. Может проблема в том, что я использую не плату ардуино, а просто контроллер? Вот фьюзы на всякий случай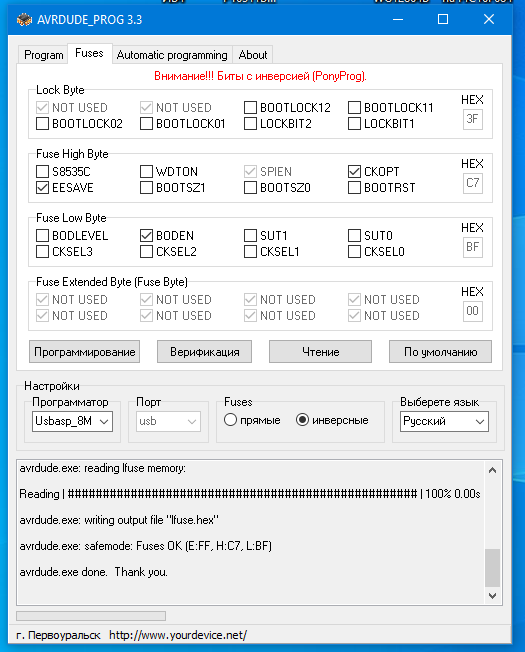
Это после записи крайней версии скетча
Прошивайте через Arduino IDE используя USBasp.
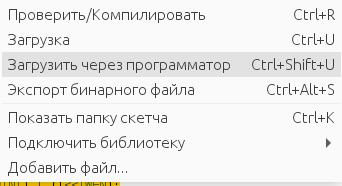
Я именно так и делаю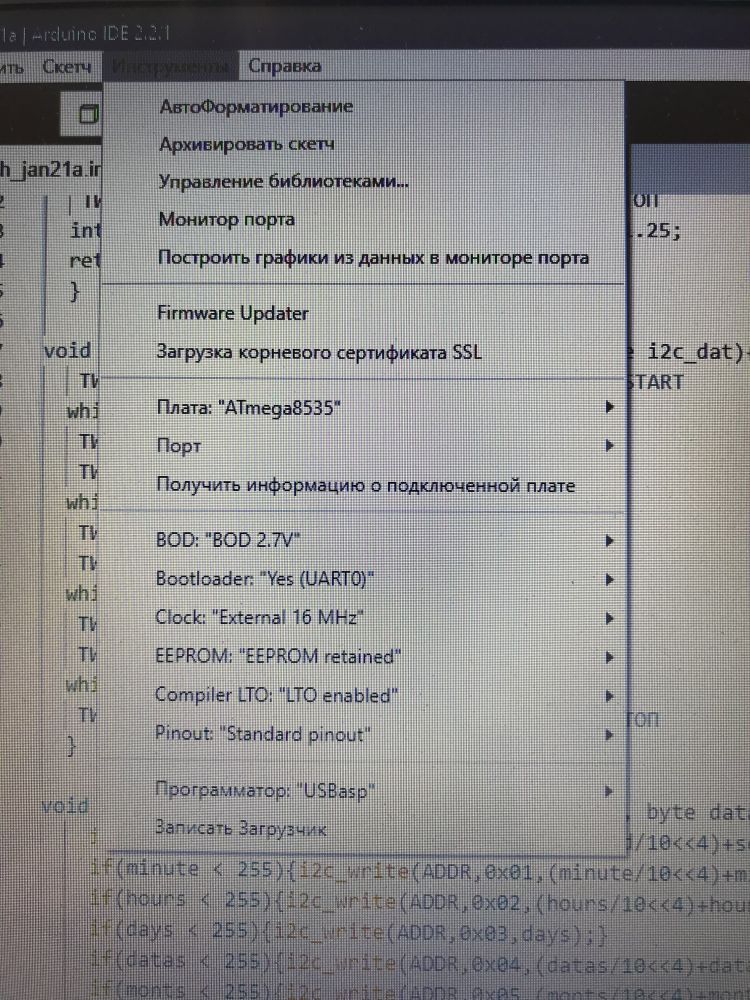
if(sec==10||sec==40) {temper = i2c_read_i2c_2bit(0x48,0)-TEMP_KORR ;}
Если закомментировать эту строку мерцание пропадает?
При выборе частоты кварца в 16 МГц нажимали "Записать загрузчик"?
Нет, мерцание не пропадает. Температура - отображаются нули. Вопрос: Вы тестировали в железе скетч с датчиком DHT, там не было мерцания индикатора? по сути дела датчик LM75 это аналогичное доп.устройство, подключенное по I2c
Прошу прощения, нужно отлучиться на пару часов
Вы тестировали в железе скетч с датчиком DHT, там не было мерцания индикатора?
Мерцания не было.
Хотел для эксперимента загрузить Ваш скетч для датчика с первой страницы:
http://forum.rcl-radio.ru/viewtopic.php?pid=5383#p5383
но при проверке/компиляции выдает ошибку:
Compilation error: 'byte min' redeclared as different kind of symbol
// ATMEGA8535 16 MHZ
#define ADDR_HTU21D 0x40
#define ADDR 0x68
#define CPU_F 16000000 // Clock Speed
#define SCL_F 100000 // // I2C Speed
#include <avr/io.h>
#include <util/delay.h>
byte a[16],an,segm,i;
bool w=1,w1,w2,w3,f2,f3;
byte sec,min_,hour,datat,mont,year;
int temper,sett,times,humidity;
int set_hour,set_min,set_sec,set_datat,set_mont,set_year;
int main(){
DDRA = 0xFF;
DDRB = 0xFF;
DDRC = 0xFF;
DDRD |= (1 << PD6)|(1 << PD7);
PORTD |= (1 << PD2)|(1 << PD3)|(1 << PD4);
TWBR = (((CPU_F)/(SCL_F)-16 )/2) ;
TWSR = 0;
DDRD |= (1 << PD5); // PWM +180V TIMER_1
cli();
// TIMER_2 F = 16000000/128/100=1250 Hz (800 uS)
OCR2 = 100;
TCCR2 |= (1 << WGM21);
TCCR2 |= (1 << CS22) | (1 << CS20);
TIMSK |= (1 << OCIE2);
// TIMER_1 F = 16000000/1024/1/1=15625 Hz
TCCR1A |= (1 << COM1A1);
TCCR1B |= (1 << WGM12);
TCCR1A |= (1 << WGM11) | (1 << WGM10);
TCCR1B |= (1 << CS10);
ICR1 = 1023;
OCR1A = 350;
sei();
// set_time(22,2,2,4,22,23,0);// год 00-99, ДН 1-7 (1=ВС), месяц 1-12, дата 1-31, час 0-23, минуты 0-59, секунды 0-59
i2c_write(ADDR_HTU21D,0xE6,0b10000001); // 11 bit
_delay_ms(200);
while(1) {
hour = (i2c_read(ADDR,2) & 0x0F) + (((i2c_read(ADDR,2) & 0x70) >> 4) * 10);
min_ = (i2c_read(ADDR,1) & 0x0F) + (((i2c_read(ADDR,1) & 0x70) >> 4) * 10);
datat = ((i2c_read(ADDR,4) & 0x0F) + ((i2c_read(ADDR,4) & 0x70) >> 4) * 10);
mont = ((i2c_read(ADDR,5) & 0x0F) + ((i2c_read(ADDR,5) & 0x70) >> 4) * 10);
year = ((i2c_read(ADDR,6) & 0x0F) + ((i2c_read(ADDR,6) & 0x70) >> 4) * 10);
sec = (i2c_read(ADDR,0) & 0x0F) + (((i2c_read(ADDR,0) & 0x70) >> 4) * 10);
set_year = year;set_mont = mont;set_datat = datat;set_hour = hour;set_min = min_;set_sec = sec;
if(sec==10&&f2==0){f2=1;w2=1;}if(sec>10){f2=0;}
if(sec==20&&f3==0){f3=1;w3=1;}if(sec>20){f3=0;}
if(w2==1) {w2=0;temper = (-46.85+175.72*(i2c_read_2byte(ADDR_HTU21D,0xE3)/65536.00))*10;}
if(w3==1) {w3=0;humidity = (-6+125*(i2c_read_2byte(ADDR_HTU21D,0xE5)/65536.00))*10;}
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/// BUTTON /////////////
if(((PIND >> PD2) & 1) == 0){sett++;times=0;if(sett>6){sett=0;}wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==1){set_hour++;w1=1; if(set_hour>23){set_hour=23;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==1){set_hour--;w1=1; if(set_hour<0){set_hour=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==2){set_min++;w1=1; if(set_mont>59){set_min=59;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==2){set_min--;w1=1; if(set_mont<0){set_min=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==3){set_sec=0;w1=1; set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==3){set_sec=0;w1=1; set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==4){set_datat++;w1=1; if(set_datat>31){set_datat=31;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==4){set_datat--;w1=1; if(set_datat<0){set_datat=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==5){set_mont++;w1=1; if(set_mont>12){set_mont=12;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==5){set_mont--;w1=1; if(set_mont<0){set_mont=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==6){set_year++;w1=1; if(set_year>50){set_year=50;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==6){set_year--;w1=1; if(set_year<22){set_year=22;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(sett==0){
if(min_==30&&sec<10){a[0]=sec%10+20;a[1]=sec%10+20;a[2]=sec%10+20;a[3]=sec%10+20;a[4]=sec%10+20;a[5]=sec%10+20;a[6]=sec%10+20;a[7]=sec%10+20;
a[8]=sec%10+20;a[9]=sec%10+20;a[10]=sec%10+20;a[11]=sec%10+20;a[12]=sec%10+20;a[13]=sec%10+20;a[14]=sec%10+20;a[15]=sec%10+20;}
else{
if(sec>=20&&sec<40){
a[0]=14;
a[1]=13;
a[2]=temper%10;
a[3]=temper/10%10+20;
a[4]=temper/100;
a[5]=10;
a[6]=12;
}
else if(sec>=40&&sec<59){
a[0]=16;
a[1]=13;
a[2]=humidity%10;
a[3]=humidity/10%10+20;
a[4]=humidity/100;
a[5]=10;
a[6]=15;
}
else{
a[0]=10;
a[1]=year%10;
a[2]=year/10;
a[3]=mont%10+20;
a[4]=mont/10;
a[5]=datat%10+20;
a[6]=datat/10;
}
a[7]=10;
a[8]=sec%10;
a[9]=sec/10;
a[10]=11;
a[11]=min_%10;
a[12]=min_/10;
a[13]=11;
a[14]=hour%10;
a[15]=hour/10;
}
}// sett=0
if(sett>0){
a[0]=10;
if(sett==6){if(times<=500||w1==1){w1=0;a[1]=year%10+20;a[2]=year/10;}else{a[1]=10;a[2]=10;}}
if(sett==5){if(times<=500||w1==1){w1=0;a[3]=mont%10+20;a[4]=mont/10;}else{a[3]=10;a[4]=10;}}
if(sett==4){if(times<=500||w1==1){w1=0;a[5]=datat%10+20;a[6]=datat/10;}else{a[5]=10;a[6]=10;}}
a[7]=10;
if(sett==3){if(times<=500||w1==1){w1=0;a[8]=sec%10;a[9]=sec/10;}else{a[8]=10;a[9]=10;}}
a[10]=11;
if(sett==2){if(times<=500||w1==1){w1=0;a[11]=min_%10;a[12]=min_/10;}else{a[11]=10;a[12]=10;}}
a[13]=11;
if(sett==1){if(times<=500||w1==1){w1=0;a[14]=hour%10;a[15]=hour/10;}else{a[14]=10;a[15]=10;}}
if(sett!=3){a[8]=sec%10;a[9]=sec/10;}
}// sett>0
}}
void wr(){a[0]=10;a[1]=year%10; a[2]=year/10;a[3]=mont%10+20;a[4]=mont/10;a[5]=datat%10+20;a[6]=datat/10;a[7]=10;a[8]=sec%10;
a[9]=sec/10;a[10]=11;a[11]=min_%10;a[12]=min_/10;a[13]=11;a[14]=hour%10;a[15]=hour/10;}
ISR(TIMER2_COMP_vect){
switch(i){
case 0: segm=a[0]; an=16; anod(); _delay_us(600); segment(); if(a[0]==10)an=16;else an=0; anod(); break;
case 1: segm=a[1]; an=16; anod(); _delay_us(600); segment(); if(a[1]==10)an=16;else an=1; anod(); break;
case 2: segm=a[2]; an=16; anod(); _delay_us(600); segment(); if(a[2]==10)an=16;else an=2; anod(); break;
case 3: segm=a[3]; an=16; anod(); _delay_us(600); segment(); if(a[3]==10)an=16;else an=3; anod(); break;
case 4: segm=a[4]; an=16; anod(); _delay_us(600); segment(); if(a[4]==10)an=16;else an=4; anod(); break;
case 5: segm=a[5]; an=16; anod(); _delay_us(600); segment(); if(a[5]==10)an=16;else an=5; anod(); break;
case 6: segm=a[6]; an=16; anod(); _delay_us(600); segment(); if(a[6]==10)an=16;else an=6; anod(); break;
case 7: segm=a[7]; an=16; anod(); _delay_us(600); segment(); if(a[7]==10)an=16;else an=7; anod(); break;
case 8: segm=a[8]; an=16; anod(); _delay_us(400); segment(); if(a[8]==10)an=16;else an=8; anod(); break;
case 9: segm=a[9]; an=16; anod(); _delay_us(600); segment(); if(a[9]==10)an=16;else an=9; anod(); break;
case 10: segm=a[10]; an=16; anod(); _delay_us(600); segment(); if(a[10]==10)an=16;else an=10; anod(); break;
case 11: segm=a[11]; an=16; anod(); _delay_us(600); segment(); if(a[11]==10)an=16;else an=11; anod(); break;
case 12: segm=a[12]; an=16; anod(); _delay_us(600); segment(); if(a[12]==10)an=16;else an=12; anod(); break;
case 13: segm=a[13]; an=16; anod(); _delay_us(600); segment(); if(a[13]==10)an=16;else an=13; anod(); break;
case 14: segm=a[14]; an=16; anod(); _delay_us(600); segment(); if(a[14]==10)an=16;else an=14; anod(); break;
case 15: segm=a[15]; an=16; anod(); _delay_us(600); segment(); if(a[15]==10)an=16;else an=15; anod(); break;
}i++;if(i>15){i=0;}times++;if(times>600){times=0;}}
void segment(){
switch(segm){
// GECDXBFA
case 0: PORTA = 0b01110111;break;
case 1: PORTA = 0b00100100;break;
case 2: PORTA = 0b11010101;break;
case 3: PORTA = 0b10110101;break;
case 4: PORTA = 0b10100110;break;
case 5: PORTA = 0b10110011;break;
case 6: PORTA = 0b11110011;break;
case 7: PORTA = 0b00100101;break;
case 8: PORTA = 0b11110111;break;
case 9: PORTA = 0b10110111;break;
// GECDXBFA
case 20: PORTA = 0b01111111;break;
case 21: PORTA = 0b00101100;break;
case 22: PORTA = 0b11011101;break;
case 23: PORTA = 0b10111101;break;
case 24: PORTA = 0b10101110;break;
case 25: PORTA = 0b10111011;break;
case 26: PORTA = 0b11111011;break;
case 27: PORTA = 0b00101101;break;
case 28: PORTA = 0b11111111;break;
case 29: PORTA = 0b10111111;break;
// GECDXBFA
case 10: PORTA = 0b00000000;break; // пусто
case 11: PORTA = 0b10000000;break; // -
case 12: PORTA = 0b11010010;break; // t
case 13: PORTA = 0b10000111;break; // гр
case 14: PORTA = 0b01010011;break; // C
case 15: PORTA = 0b11100110;break; // H
case 16: PORTA = 0b11110000;break; // o
}}
void anod(){
switch(an){
case 0: PORTC &=~(1<<PC7);PORTB |=(1<<PB0);break;
case 1: PORTB &=~(1<<PB0);PORTB |=(1<<PB1);break;
case 2: PORTB &=~(1<<PB1);PORTB |=(1<<PB2);break;
case 3: PORTB &=~(1<<PB2);PORTB |=(1<<PB3);break;
case 4: PORTB &=~(1<<PB3);PORTB |=(1<<PB4);break;
case 5: PORTB &=~(1<<PB4);PORTB |=(1<<PB5);break;
case 6: PORTB &=~(1<<PB5);PORTB |=(1<<PB6);break;
case 7: PORTB &=~(1<<PB6);PORTB |=(1<<PB7);break;
case 8: PORTB &=~(1<<PB7);PORTD |=(1<<PD6);break;
case 9: PORTD &=~(1<<PD6);PORTD |=(1<<PD7);break;
case 10: PORTD &=~(1<<PD7);PORTC |=(1<<PC2);break;
case 11: PORTC &=~(1<<PC2);PORTC |=(1<<PC3);break;
case 12: PORTC &=~(1<<PC3);PORTC |=(1<<PC4);break;
case 13: PORTC &=~(1<<PC4);PORTC |=(1<<PC5);break;
case 14: PORTC &=~(1<<PC5);PORTC |=(1<<PC6);break;
case 15: PORTC &=~(1<<PC6);PORTC |=(1<<PC7);break;
case 16: PORTB &=~(1<<PB0);PORTB &=~(1<<PB1);PORTB &=~(1<<PB2);PORTB &=~(1<<PB3);PORTB &=~(1<<PB4);PORTB &=~(1<<PB5);PORTB &=~(1<<PB6);PORTB &=~(1<<PB7);
PORTD &=~(1<<PD6);PORTD &=~(1<<PD7);PORTC &=~(1<<PC2);PORTC &=~(1<<PC3);PORTC &=~(1<<PC4);PORTC &=~(1<<PC5);PORTC &=~(1<<PC6);PORTC &=~(1<<PC7);break;
}}
int i2c_read_2byte(byte i2c_addr, byte i2c_reg){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = (i2c_addr << 1) | 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR=(1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while(~TWCR&(1<<TWINT));
int i2c_data0 = TWDR;
TWCR = (1<<TWINT) | (1<<TWEN);
while(~TWCR&(1<<TWINT));
int i2c_data1 = TWDR;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
int i2c_data = (i2c_data0<<8)+i2c_data1;
return i2c_data;
}
byte i2c_read(byte i2c_addr, byte i2c_reg){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = (i2c_addr << 1) | 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
byte i2c_data = TWDR;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
return i2c_data;
}
void i2c_write(byte i2c_addr, byte i2c_reg, byte i2c_dat){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_dat;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
}
void set_time(byte years, byte days, byte monts, byte datas, byte hours ,byte minute, byte second){
if(second < 255){i2c_write(ADDR,0x00,(second/10<<4)+second%10);}
if(minute < 255){i2c_write(ADDR,0x01,(minute/10<<4)+minute%10);}
if(hours < 255){i2c_write(ADDR,0x02,(hours/10<<4)+hours%10);}
if(days < 255){i2c_write(ADDR,0x03,days);}
if(datas < 255){i2c_write(ADDR,0x04,(datas/10<<4)+datas%10);}
if(monts < 255){i2c_write(ADDR,0x05,(monts/10<<4)+monts%10);}
if(years < 255){i2c_write(ADDR,0x06,(years/10<<4)+years%10);}
} Проверил. Понятно, что контроллер виснет при обращении к датчику температуры. Но появляется чуть заметное мерцание индикатора, значительно слабее, чем при работе со скетчами для DS18b20 и LM75
Я понизил динамическую индикацию до 60 Гц, посмотрите мерцание, что поменялось
// ATMEGA8535 16 MHZ
#define ADDR 0x68
#define CPU_F 16000000 // Clock Speed
#define SCL_F 400000 // // I2C Speed
#define TEMP_KORR 0 // гр.Цельсия
#include <avr/io.h>
#include <util/delay.h>
byte a[16],an,segm,i;
bool w=1,w1;
byte sec,min_,hour,datat,mont,year;
int temper,sett,times;
int set_hour,set_min,set_sec,set_datat,set_mont,set_year;
void setup() {
DDRA = 0xFF;
DDRB = 0xFF;
DDRC = 0xFF;
DDRD |= (1 << PD6)|(1 << PD7);
PORTD |= (1 << PD2)|(1 << PD3)|(1 << PD4);
TWBR = (((CPU_F)/(SCL_F)-16 )/2) ;
TWSR = 0;
DDRD |= (1 << PD5); // PWM +180V TIMER_1
cli();
// TIMER_2 F = 16000000/128/100=1250 Hz (800 uS)
OCR2 = 255;
TCCR2 |= (1 << WGM21);
TCCR2 |= (1 << CS22) | | (1 << CS21)|(1 << CS20);
TIMSK |= (1 << OCIE2);
// TIMER_1 F = 16000000/1024/1/1=15625 Hz
TCCR1A |= (1 << COM1A1);
TCCR1B |= (1 << WGM12);
TCCR1A |= (1 << WGM11) | (1 << WGM10);
TCCR1B |= (1 << CS10);
ICR1 = 1023;
OCR1A = 350;
sei();
// set_time(22,2,2,4,22,23,0);// год 00-99, ДН 1-7 (1=ВС), месяц 1-12, дата 1-31, час 0-23, минуты 0-59, секунды 0-59
i2c_write(0x48,0x01,0);
_delay_ms(200);
}
void loop() {
datat = ((i2c_read(ADDR,4) & 0x0F) + ((i2c_read(ADDR,4) & 0x70) >> 4) * 10);
mont = ((i2c_read(ADDR,5) & 0x0F) + ((i2c_read(ADDR,5) & 0x70) >> 4) * 10);
year = ((i2c_read(ADDR,6) & 0x0F) + ((i2c_read(ADDR,6) & 0x70) >> 4) * 10);
hour = (i2c_read(ADDR,2) & 0x0F) + (((i2c_read(ADDR,2) & 0x70) >> 4) * 10);
min_ = (i2c_read(ADDR,1) & 0x0F) + (((i2c_read(ADDR,1) & 0x70) >> 4) * 10);
if(sec==10||sec==40) {temper = i2c_read_i2c_2bit(0x48,0)-TEMP_KORR ;}
sec = (i2c_read(ADDR,0) & 0x0F) + (((i2c_read(ADDR,0) & 0x70) >> 4) * 10);
set_year = year;set_mont = mont;set_datat = datat;set_hour = hour;set_min = min_;set_sec = sec;
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/// BUTTON /////////////
if(((PIND >> PD2) & 1) == 0){sett++;times=0;if(sett>6){sett=0;}wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==1){set_hour++;w1=1; if(set_hour>23){set_hour=23;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==1){set_hour--;w1=1; if(set_hour<0){set_hour=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==2){set_min++;w1=1; if(set_mont>59){set_min=59;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==2){set_min--;w1=1; if(set_mont<0){set_min=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==3){set_sec=0;w1=1; set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==3){set_sec=0;w1=1; set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==4){set_datat++;w1=1; if(set_datat>31){set_datat=31;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==4){set_datat--;w1=1; if(set_datat<0){set_datat=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==5){set_mont++;w1=1; if(set_mont>12){set_mont=12;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==5){set_mont--;w1=1; if(set_mont<0){set_mont=0;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD3) & 1) == 0 && sett==6){set_year++;w1=1; if(set_year>50){set_year=50;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(((PIND >> PD4) & 1) == 0 && sett==6){set_year--;w1=1; if(set_year<22){set_year=22;} set_time(set_year,0,set_mont,set_datat,set_hour,set_min,set_sec);wr();_delay_ms(300);}
if(sett==0){
if(min_==30&&sec<10){a[0]=sec%10+20;a[1]=sec%10+20;a[2]=sec%10+20;a[3]=sec%10+20;a[4]=sec%10+20;a[5]=sec%10+20;a[6]=sec%10+20;a[7]=sec%10+20;
a[8]=sec%10+20;a[9]=sec%10+20;a[10]=sec%10+20;a[11]=sec%10+20;a[12]=sec%10+20;a[13]=sec%10+20;a[14]=sec%10+20;a[15]=sec%10+20;}
else{
if((sec>=10&&sec<=20)||(sec>=40&&sec<=50)){
a[0]=14;
a[1]=13;
a[2]=temper%10;
a[3]=temper/10%10+20;
a[4]=temper/100;
a[5]=10;
a[6]=12;
}
else{
a[0]=10;
a[1]=year%10;
a[2]=year/10;
a[3]=mont%10+20;
a[4]=mont/10;
a[5]=datat%10+20;
a[6]=datat/10;
}
a[7]=10;
a[8]=sec%10;
a[9]=sec/10;
a[10]=11;
a[11]=min_%10;
a[12]=min_/10;
a[13]=11;
a[14]=hour%10;
a[15]=hour/10;
}
}// sett=0
if(sett>0){
a[0]=10;
if(sett==6){if(times<=500||w1==1){w1=0;a[1]=year%10+20;a[2]=year/10;}else{a[1]=11;a[2]=11;}}
if(sett==5){if(times<=500||w1==1){w1=0;a[3]=mont%10+20;a[4]=mont/10;}else{a[3]=11;a[4]=11;}}
if(sett==4){if(times<=500||w1==1){w1=0;a[5]=datat%10+20;a[6]=datat/10;}else{a[5]=11;a[6]=11;}}
a[7]=10;
if(sett==3){if(times<=500||w1==1){w1=0;a[8]=sec%10;a[9]=sec/10;}else{a[8]=11;a[9]=11;}}
a[10]=11;
if(sett==2){if(times<=500||w1==1){w1=0;a[11]=min_%10;a[12]=min_/10;}else{a[11]=11;a[12]=11;}}
a[13]=11;
if(sett==1){if(times<=500||w1==1){w1=0;a[14]=hour%10;a[15]=hour/10;}else{a[14]=11;a[15]=11;}}
if(sett!=3){a[8]=sec%10;a[9]=sec/10;}
}// sett>0
if(sett==0){_delay_ms(100);}
}
void wr(){a[0]=10;a[1]=year%10; a[2]=year/10;a[3]=mont%10+20;a[4]=mont/10;a[5]=datat%10+20;a[6]=datat/10;a[7]=10;a[8]=sec%10;
a[9]=sec/10;a[10]=11;a[11]=min_%10;a[12]=min_/10;a[13]=11;a[14]=hour%10;a[15]=hour/10;}
ISR(TIMER2_COMP_vect){
switch(i){
case 0: segm=a[0]; an=16; anod(); _delay_us(600); segment(); if(a[0]==10)an=16;else an=0; anod(); break;
case 1: segm=a[1]; an=16; anod(); _delay_us(600); segment(); if(a[1]==10)an=16;else an=1; anod(); break;
case 2: segm=a[2]; an=16; anod(); _delay_us(600); segment(); if(a[2]==10)an=16;else an=2; anod(); break;
case 3: segm=a[3]; an=16; anod(); _delay_us(600); segment(); if(a[3]==10)an=16;else an=3; anod(); break;
case 4: segm=a[4]; an=16; anod(); _delay_us(600); segment(); if(a[4]==10)an=16;else an=4; anod(); break;
case 5: segm=a[5]; an=16; anod(); _delay_us(600); segment(); if(a[5]==10)an=16;else an=5; anod(); break;
case 6: segm=a[6]; an=16; anod(); _delay_us(600); segment(); if(a[6]==10)an=16;else an=6; anod(); break;
case 7: segm=a[7]; an=16; anod(); _delay_us(600); segment(); if(a[7]==10)an=16;else an=7; anod(); break;
case 8: segm=a[8]; an=16; anod(); _delay_us(400); segment(); an=8; anod(); break;
case 9: segm=a[9]; an=16; anod(); _delay_us(400); segment(); an=9; anod(); break;
case 10: segm=a[10]; an=16; anod(); _delay_us(400); segment(); an=10; anod(); break;
case 11: segm=a[11]; an=16; anod(); _delay_us(400); segment(); an=11; anod(); break;
case 12: segm=a[12]; an=16; anod(); _delay_us(400); segment(); an=12; anod(); break;
case 13: segm=a[13]; an=16; anod(); _delay_us(400); segment(); an=13; anod(); break;
case 14: segm=a[14]; an=16; anod(); _delay_us(400); segment(); an=14; anod(); break;
case 15: segm=a[15]; an=16; anod(); _delay_us(400); segment(); an=15; anod(); break;
}i++;if(i>15){i=0;}times++;if(times>600){times=0;}}
void segment(){
switch(segm){
// GECDXBFA
case 0: PORTA = 0b01110111;break;
case 1: PORTA = 0b00100100;break;
case 2: PORTA = 0b11010101;break;
case 3: PORTA = 0b10110101;break;
case 4: PORTA = 0b10100110;break;
case 5: PORTA = 0b10110011;break;
case 6: PORTA = 0b11110011;break;
case 7: PORTA = 0b00100101;break;
case 8: PORTA = 0b11110111;break;
case 9: PORTA = 0b10110111;break;
// GECDXBFA
case 20: PORTA = 0b01111111;break;
case 21: PORTA = 0b00101100;break;
case 22: PORTA = 0b11011101;break;
case 23: PORTA = 0b10111101;break;
case 24: PORTA = 0b10101110;break;
case 25: PORTA = 0b10111011;break;
case 26: PORTA = 0b11111011;break;
case 27: PORTA = 0b00101101;break;
case 28: PORTA = 0b11111111;break;
case 29: PORTA = 0b10111111;break;
// GECDXBFA
case 10: PORTA = 0b00000000;break; // пусто
case 11: PORTA = 0b10000000;break; // -
case 12: PORTA = 0b11010010;break; // t
case 13: PORTA = 0b10000111;break; // гр
case 14: PORTA = 0b01010011;break; // C
}}
void anod(){
switch(an){
case 0: PORTC &=~(1<<PC7);PORTB |=(1<<PB0);break;
case 1: PORTB &=~(1<<PB0);PORTB |=(1<<PB1);break;
case 2: PORTB &=~(1<<PB1);PORTB |=(1<<PB2);break;
case 3: PORTB &=~(1<<PB2);PORTB |=(1<<PB3);break;
case 4: PORTB &=~(1<<PB3);PORTB |=(1<<PB4);break;
case 5: PORTB &=~(1<<PB4);PORTB |=(1<<PB5);break;
case 6: PORTB &=~(1<<PB5);PORTB |=(1<<PB6);break;
case 7: PORTB &=~(1<<PB6);PORTB |=(1<<PB7);break;
case 8: PORTB &=~(1<<PB7);PORTD |=(1<<PD6);break;
case 9: PORTD &=~(1<<PD6);PORTD |=(1<<PD7);break;
case 10: PORTD &=~(1<<PD7);PORTC |=(1<<PC2);break;
case 11: PORTC &=~(1<<PC2);PORTC |=(1<<PC3);break;
case 12: PORTC &=~(1<<PC3);PORTC |=(1<<PC4);break;
case 13: PORTC &=~(1<<PC4);PORTC |=(1<<PC5);break;
case 14: PORTC &=~(1<<PC5);PORTC |=(1<<PC6);break;
case 15: PORTC &=~(1<<PC6);PORTC |=(1<<PC7);break;
case 16: PORTB &=~(1<<PB0);PORTB &=~(1<<PB1);PORTB &=~(1<<PB2);PORTB &=~(1<<PB3);PORTB &=~(1<<PB4);PORTB &=~(1<<PB5);PORTB &=~(1<<PB6);PORTB &=~(1<<PB7);
PORTD &=~(1<<PD6);PORTD &=~(1<<PD7);PORTC &=~(1<<PC2);PORTC &=~(1<<PC3);PORTC &=~(1<<PC4);PORTC &=~(1<<PC5);PORTC &=~(1<<PC6);PORTC &=~(1<<PC7);break;
}}
byte i2c_read(byte i2c_addr, byte i2c_reg){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = (i2c_addr << 1) | 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
byte i2c_data = TWDR;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
return i2c_data;
}
int i2c_read_i2c_2bit(byte i2c_addr, byte i2c_reg){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = (i2c_addr << 1) | 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR=(1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while(~TWCR&(1<<TWINT));
int i2c_data0 = TWDR;
TWCR = (1<<TWINT) | (1<<TWEN);
while(~TWCR&(1<<TWINT));
int i2c_data1 = TWDR;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
int i2c_data = (i2c_data0*10)+(i2c_data1>>5)*1.25;
return i2c_data;
}
void i2c_write(byte i2c_addr, byte i2c_reg, byte i2c_dat){
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN); // START
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_addr << 1;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_reg;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWDR = i2c_dat;
TWCR = (1<<TWINT) | (1<<TWEN);
while (!(TWCR & (1<<TWINT)));
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // СТОП
}
void set_time(byte years, byte days, byte monts, byte datas, byte hours ,byte minute, byte second){
if(second < 255){i2c_write(ADDR,0x00,(second/10<<4)+second%10);}
if(minute < 255){i2c_write(ADDR,0x01,(minute/10<<4)+minute%10);}
if(hours < 255){i2c_write(ADDR,0x02,(hours/10<<4)+hours%10);}
if(days < 255){i2c_write(ADDR,0x03,days);}
if(datas < 255){i2c_write(ADDR,0x04,(datas/10<<4)+datas%10);}
if(monts < 255){i2c_write(ADDR,0x05,(monts/10<<4)+monts%10);}
if(years < 255){i2c_write(ADDR,0x06,(years/10<<4)+years%10);}
} выдает ошибку при компиляции:
Compilation error: expected primary-expression before '|' token
forum.rcl-radio.ru → Тестирование скетчей → Часы на игп-17 (разработка)
Форум работает на PunBB, при поддержке Informer Technologies, Inc
|
|