Тема: Простые часы на семисегментных индикаторах (Arduino Nano+ds3231)
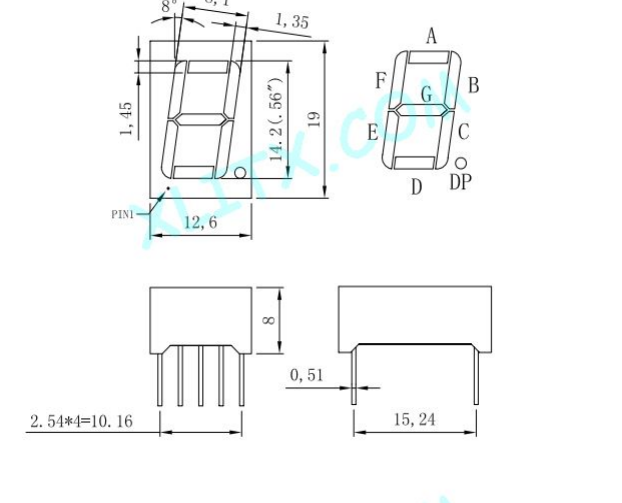
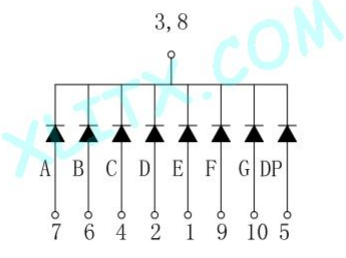
индикаторы - 5161AS - http://www.xlitx.com/datasheet/5161AS.pdf
#define K3 A3
#define K2 A2
#define K1 A1
#define K0 A0
#define SEG_A 8
#define SEG_B 7
#define SEG_C 4
#define SEG_D 5
#define SEG_E 2
#define SEG_F 6
#define SEG_G 9
#define SEG_DP 3
#define SET 10
#define UP 11
#define DW 12
#define NIGHT 1
#include <EEPROM.h>
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
DS3231 clock;RTCDateTime DateTime;
byte an,segm,a[4],i,dp;
int hour,minut,secon,old_sec,hh,mm,set=0;
unsigned long times,times1;
int brig,br;
void setup(){
Wire.begin();
clock.begin();
Serial.begin(9600);
cli();
TCCR2A = 0;
TCCR2B = 0;
TCNT2 = 0;
// (16000000/((155+1)x256))=400.64102564103 Hz
OCR2A = 155;
TCCR2A |= (1 << WGM21);
// Prescaler 256
TCCR2B |= (1 << CS22) | (1 << CS21);
TIMSK2 |= (1 << OCIE2A);
sei();
pinMode(K3,OUTPUT);
pinMode(K2,OUTPUT);
pinMode(K1,OUTPUT);
pinMode(K0,OUTPUT);
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode (SET,INPUT_PULLUP);
pinMode (UP,INPUT_PULLUP);
pinMode (DW,INPUT_PULLUP);
brig = EEPROM.read(100);
if(brig>20){brig=1;EEPROM.update(100,brig);}
}
void loop(){
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
if((hour<7||hour>=22)&&NIGHT==1){br=20;}else{br=brig;}
if(digitalRead(SET)==LOW){set++;if(set>2){set=0;}delay(200);}
hh=hour;mm=minut;
if(set==1 && digitalRead(UP)==LOW){hh++;if(hh>23){hh=0;}clock.setDateTime(2023, 9, 5, hh, minut, 0);delay(200);}
if(set==1 && digitalRead(DW)==LOW){hh--;if(hh<0){hh=0;}clock.setDateTime(2023, 9, 5, hh, minut, 0);delay(200);}
if(set==2 && digitalRead(UP)==LOW){mm++;if(mm>59){mm=0;}clock.setDateTime(2023, 9, 5, hour, mm, 0);delay(200);}
if(set==2 && digitalRead(DW)==LOW){mm--;if(mm<0){mm=0;}clock.setDateTime(2023, 9, 5, hour, mm, 0);delay(200);}
if(set==0 && digitalRead(UP)==LOW){brig--;if(brig<1){brig=1;}EEPROM.update(100,brig);delay(200);}
if(set==0 && digitalRead(DW)==LOW){brig++;if(brig>20){brig=20;}EEPROM.update(100,brig);delay(200);}
if(set==1&&millis()-times<200){a[0]=10;a[1]=10;}
else{a[0] = hour/10%10; a[1] = hour%10; }
if(set==2&&millis()-times<200){a[2]=10;a[3]=10;}
else{a[2] = minut/10%10; a[3] = minut%10; }
if(set==0){
a[0]=hour/10%10;
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
}
if(millis()-times>400){times=millis();}
if(millis()-times1<500){dp=1;}else{dp=0;}
if(old_sec!=secon){old_sec=secon;times1=millis();}
delay(100);
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 0
case 1: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 1
case 2: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 1); break; // 2
case 3: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 3
case 4: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 1); break; // 4
case 5: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 1); break; // 5
case 6: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 6
case 7: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 7
case 8: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 8
case 9: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 1); break; // 9
case 10: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // пусто
}
}
ISR(TIMER2_COMPA_vect){
switch (i) {
case 0: segm = 10; segment();an = 10;kat();delayMicroseconds(br*100);segm = a[0];segment();an = 0;kat();ch(SEG_DP, 0);break;
case 1: segm = 10; segment();an = 10;kat();delayMicroseconds(br*100);segm = a[1];segment();an = 1;kat();ch(SEG_DP, dp);break;
case 2: segm = 10; segment();an = 10;kat();delayMicroseconds(br*100);segm = a[2];segment();an = 2;kat();ch(SEG_DP, dp);break;
case 3: segm = 10; segment();an = 10;kat();delayMicroseconds(br*100);segm = a[3];segment();an = 3;kat();ch(SEG_DP, 0);break;
}
i++;if (i > 3) {i = 0;}
}
void kat() {
switch (an) {
case 0: ch(K3, 1); ch(K2, 0); ch(K1, 0); ch(K0, 0); break;
case 1: ch(K3, 0); ch(K2, 1); ch(K1, 0); ch(K0, 0); break;
case 2: ch(K3, 0); ch(K2, 0); ch(K1, 1); ch(K0, 0); break;
case 3: ch(K3, 0); ch(K2, 0); ch(K1, 0); ch(K0, 1); break;
case 10: ch(K3, 0); ch(K2, 0); ch(K1, 0); ch(K0, 0); break;
}
}
void ch(int pin, int logic){digitalWrite(pin, logic);}