Страницы Назад 1 … 8 9 10 11 12 … 17 Далее
Чтобы отправить ответ, вы должны войти или зарегистрироваться
Вы не вошли. Пожалуйста, войдите или зарегистрируйтесь.
forum.rcl-radio.ru → Новые идеи для проектов Arduino → Часы с календарем
Страницы Назад 1 … 8 9 10 11 12 … 17 Далее
Чтобы отправить ответ, вы должны войти или зарегистрироваться
Тогда будем переворачивать индикатор
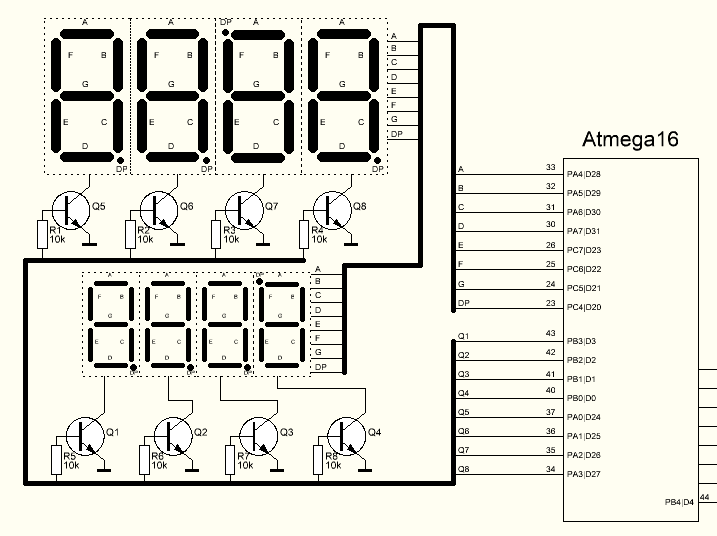
Индикаторы у меня с общим анодом. На коллектор+, эмиттер на анод
Резисторы 330 Ом, максимальный ток на пин 15 мА
360 Ом у меня.Макет готов к проверке
Просто тест индикации
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 33
#define SEG_B 32
#define SEG_C 31
#define SEG_D 30
#define SEG_E 26
#define SEG_F 25
#define SEG_G 24
#define SEG_DP 23
//// Аноды
#define AN_Q1 43
#define AN_Q2 42
#define AN_Q3 41
#define AN_Q4 40
#define AN_Q5 37
#define AN_Q6 36
#define AN_Q7 35
#define AN_Q8 34
#include <Wire.h>
//#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
#include <OneWire.h> // http://rcl-radio.ru/wp-content/uploads/2018/07/OneWire.zip
//DS3231 clock;RTCDateTime DateTime;
OneWire ds(20); // Вход датчика 18b20 (PC4 23 пин контр)
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an;
int hh,mm;
void setup() {
Wire.begin();
// clock.begin();
// clock.setDateTime(2023, 8, 26, 20, 40, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
a[0]=1;
a[1]=2;
a[2]=3;
a[3]=4;
a[4]=5;
a[5]=6;
a[6]=7;
a[7]=8;
delay(1000);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0]; segment(); an = 0; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1]; segment(); an = 1; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2]; segment(); an = 2; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3]; segment(); an = 3; anod();break;
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4]; segment(); an = 4; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5]; segment(); an = 5; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6]; segment(); an = 6; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7]; segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 1: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 2: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 3: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 4: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 5: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 6: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 7: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 10: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}
float dsRead(byte x) {
byte data[2], addr[8][8], kol = 0;
while (ds.search(addr[kol])) { // поиск датчиков, определение адреса и кол-ва датчиков
kol++;
}
ds.reset_search(); // Сброс поиска датчика
ds.reset(); // Инициализация, выполняется сброс шины
ds.select(addr[x]); // Обращение к датчику по адресу
ds.write(0x44, 0); // Измерение температуры с переносом данных в память
ds.reset(); // Инициализация, выполняется сброс шины
ds.select(addr[x]); // Обращение к датчику по адресу
ds.write(0xBE); // Обращение памяти
data[0] = ds.read();// Чтение памяти byte low
data[1] = ds.read();// Чтение памяти byte high
float value = ((data[1] << 8) | data[0]) / 16.0; return (float)value; // Расчет температуры и вывод
}Горят сегменты D и E в ключах Q5,Q6,Q7
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 33
#define SEG_B 32
#define SEG_C 31
#define SEG_D 30
#define SEG_E 26
#define SEG_F 25
#define SEG_G 24
#define SEG_DP 23
//// Аноды
#define AN_Q1 43
#define AN_Q2 42
#define AN_Q3 41
#define AN_Q4 40
#define AN_Q5 37
#define AN_Q6 36
#define AN_Q7 35
#define AN_Q8 34
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an;
int hh,mm;
void setup() {
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
a[0]=1;
a[1]=2;
a[2]=3;
a[3]=4;
a[4]=5;
a[5]=6;
a[6]=7;
a[7]=8;
delay(1000);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0]; segment(); an = 0; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1]; segment(); an = 1; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2]; segment(); an = 2; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3]; segment(); an = 3; anod();break;
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4]; segment(); an = 4; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5]; segment(); an = 5; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6]; segment(); an = 6; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7]; segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 1: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 2: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 3: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 4: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 5: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 6: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 7: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 10: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}Добавились сегменты С к ключам Q6,Q7
У меня частота на 8 МГц как в тех часах
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an;
int hh,mm;
void setup() {
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
a[0]=1;
a[1]=2;
a[2]=3;
a[3]=4;
a[4]=5;
a[5]=6;
a[6]=7;
a[7]=8;
delay(1000);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0]; segment(); an = 0; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1]; segment(); an = 1; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2]; segment(); an = 2; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3]; segment(); an = 3; anod();break;
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4]; segment(); an = 4; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5]; segment(); an = 5; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6]; segment(); an = 6; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7]; segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 1: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 2: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 3: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 4: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 5: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
case 6: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 7: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 10: ch(AN_Q1, 1); ch(AN_Q2, 1); ch(AN_Q3, 1); ch(AN_Q4, 1); ch(AN_Q5, 1); ch(AN_Q6, 1); ch(AN_Q7, 1); ch(AN_Q8, 1); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}Горят все сегменты на всех индикаторах
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an;
int hh,mm;
void setup() {
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
a[0]=1;
a[1]=2;
a[2]=3;
a[3]=4;
a[4]=5;
a[5]=6;
a[6]=7;
a[7]=8;
delay(1000);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0]; segment(); an = 0; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1]; segment(); an = 1; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2]; segment(); an = 2; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3]; segment(); an = 3; anod();break;
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4]; segment(); an = 4; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5]; segment(); an = 5; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6]; segment(); an = 6; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7]; segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}Цифры с 1- Q1 по 8-Q8 с точками
Все точки должны погаснуть
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an, dp1,dp2;
int hh,mm;
void setup() {
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
a[0]=1;
a[1]=2;
a[2]=3;
a[3]=4;
a[4]=5;
a[5]=6;
a[6]=7;
a[7]=8;
delay(1000);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,1); segment(); an = 1; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,1); segment(); an = 2; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 3; anod();break;
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 5; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 6; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}Теперь без точек
Подключите Ds3231
DS3231 к 19 и 20 пинам подключена, DS18B20 куда?
DS18B20 к 44, но пока я его не активирую.
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
DS3231 clock;RTCDateTime DateTime;
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an, dp1,dp2;
int hh,mm, dd, ms, gg;
int hour,minut,secon,data,mon,year,den,temp;
void setup() {
Wire.begin();
clock.begin();
// clock.setDateTime(2023, 8, 26, 20, 40, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
data = DateTime.day;mon = DateTime.month;year = DateTime.year;
den=DateTime.dayOfWeek;
a[0]=hour/10%10;
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;}
a[5]=data%10;
if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;}
a[7]=mon%10;
delay(1000);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,1); segment(); an = 1; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,1); segment(); an = 2; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 3; anod();break;
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 5; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 6; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}Должны мигать точки большого индикатора в такт секундам
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
DS3231 clock;RTCDateTime DateTime;
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an, dp1,dp2;
int old_sec,dp;
int hour,minut,secon,data,mon,year,den,temp;
void setup() {
Wire.begin();
clock.begin();
// clock.setDateTime(2023, 8, 26, 20, 40, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
data = DateTime.day;mon = DateTime.month;year = DateTime.year;
den=DateTime.dayOfWeek;
a[0]=hour/10%10;
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;}
a[5]=data%10;
if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;}
a[7]=mon%10;
if(millis()-times<500){dp=1;}else{dp=0;}
if(old_sec!=secon){old_sec=secon;times=millis();}
delay(100);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 1; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 2; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 3; anod();break;
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 5; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 6; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}Должны мигать точки большого индикатора в такт секундам
// 19 === SCL // 20 === SDA //// Катоды #define SEG_A 28 #define SEG_B 29 #define SEG_C 30 #define SEG_D 31 #define SEG_E 23 #define SEG_F 22 #define SEG_G 21 #define SEG_DP 20 //// Аноды #define AN_Q1 3 #define AN_Q2 2 #define AN_Q3 1 #define AN_Q4 0 #define AN_Q5 24 #define AN_Q6 25 #define AN_Q7 26 #define AN_Q8 27 #include <Wire.h> #include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip DS3231 clock;RTCDateTime DateTime; long oldPosition = -999, newPosition, times; int a[8],segm,i,an, dp1,dp2; int old_sec,dp; int hour,minut,secon,data,mon,year,den,temp; void setup() { Wire.begin(); clock.begin(); // clock.setDateTime(2023, 8, 26, 20, 40, 0); cli(); TCCR1A = 0; TCCR1B = 0; TCNT1 = 0; // (8000000/((300+1)x64))=415.28239202658 Hz OCR1A = 300; TCCR1B |= (1 << WGM12); // Prescaler 64 TCCR1B |= (1 << CS11) | (1 << CS10); TIMSK |= (1 << OCIE1A); sei(); pinMode(SEG_A, OUTPUT); pinMode(SEG_B, OUTPUT); pinMode(SEG_C, OUTPUT); pinMode(SEG_D, OUTPUT); pinMode(SEG_E, OUTPUT); pinMode(SEG_F, OUTPUT); pinMode(SEG_G, OUTPUT); pinMode(SEG_DP, OUTPUT); pinMode(AN_Q1, OUTPUT); pinMode(AN_Q2, OUTPUT); pinMode(AN_Q3, OUTPUT); pinMode(AN_Q4, OUTPUT); pinMode(AN_Q5, OUTPUT); pinMode(AN_Q6, OUTPUT); pinMode(AN_Q7, OUTPUT); pinMode(AN_Q8, OUTPUT); // pinMode (EXIT,INPUT_PULLUP); } void loop() { DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second; data = DateTime.day;mon = DateTime.month;year = DateTime.year; den=DateTime.dayOfWeek; a[0]=hour/10%10; a[1]=hour%10; a[2]=minut/10%10; a[3]=minut%10; if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;} a[5]=data%10; if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;} a[7]=mon%10; if(millis()-times<500){dp=1;}else{dp=0;} if(old_sec!=secon){old_sec=secon;times=millis();} delay(100); } ISR(TIMER1_COMPA_vect){ switch (i) { // Q1 case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 0; anod();break; // Q2 case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 1; anod();break; // Q3 case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 2; anod();break; // Q4 case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 3; anod();break; // Q5 case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 4; anod();break; // Q6 case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 5; anod();break; // Q7 case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 6; anod();break; // Q8 case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 7; anod();break; } i++;if (i > 7) {i = 0;} } void segment() { switch (segm) { // A B C D E F G case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0 case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1 case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2 case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3 case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4 case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5 case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6 case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7 case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8 case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9 case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто } } void anod() { switch (an) { case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break; case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break; case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; } } void ch(int pin, int logic) { digitalWrite(pin, logic); }
На маленьком часы с точками
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q5 3
#define AN_Q6 2
#define AN_Q7 1
#define AN_Q8 0
#define AN_Q1 24
#define AN_Q2 25
#define AN_Q3 26
#define AN_Q4 27
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
DS3231 clock;RTCDateTime DateTime;
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an, dp1,dp2;
int old_sec,dp;
int hour,minut,secon,data,mon,year,den,temp;
void setup() {
Wire.begin();
clock.begin();
// clock.setDateTime(2023, 8, 26, 20, 40, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
data = DateTime.day;mon = DateTime.month;year = DateTime.year;
den=DateTime.dayOfWeek;
a[0]=hour/10%10;
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;}
a[5]=data%10;
if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;}
a[7]=mon%10;
if(millis()-times<500){dp=1;}else{dp=0;}
if(old_sec!=secon){old_sec=secon;times=millis();}
delay(100);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 1; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 2; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 3; anod();break;
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 5; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 6; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}// 19 === SCL // 20 === SDA //// Катоды #define SEG_A 28 #define SEG_B 29 #define SEG_C 30 #define SEG_D 31 #define SEG_E 23 #define SEG_F 22 #define SEG_G 21 #define SEG_DP 20 //// Аноды #define AN_Q5 3 #define AN_Q6 2 #define AN_Q7 1 #define AN_Q8 0 #define AN_Q1 24 #define AN_Q2 25 #define AN_Q3 26 #define AN_Q4 27 #include <Wire.h> #include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip DS3231 clock;RTCDateTime DateTime; long oldPosition = -999, newPosition, times; int a[8],segm,i,an, dp1,dp2; int old_sec,dp; int hour,minut,secon,data,mon,year,den,temp; void setup() { Wire.begin(); clock.begin(); // clock.setDateTime(2023, 8, 26, 20, 40, 0); cli(); TCCR1A = 0; TCCR1B = 0; TCNT1 = 0; // (8000000/((300+1)x64))=415.28239202658 Hz OCR1A = 300; TCCR1B |= (1 << WGM12); // Prescaler 64 TCCR1B |= (1 << CS11) | (1 << CS10); TIMSK |= (1 << OCIE1A); sei(); pinMode(SEG_A, OUTPUT); pinMode(SEG_B, OUTPUT); pinMode(SEG_C, OUTPUT); pinMode(SEG_D, OUTPUT); pinMode(SEG_E, OUTPUT); pinMode(SEG_F, OUTPUT); pinMode(SEG_G, OUTPUT); pinMode(SEG_DP, OUTPUT); pinMode(AN_Q1, OUTPUT); pinMode(AN_Q2, OUTPUT); pinMode(AN_Q3, OUTPUT); pinMode(AN_Q4, OUTPUT); pinMode(AN_Q5, OUTPUT); pinMode(AN_Q6, OUTPUT); pinMode(AN_Q7, OUTPUT); pinMode(AN_Q8, OUTPUT); // pinMode (EXIT,INPUT_PULLUP); } void loop() { DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second; data = DateTime.day;mon = DateTime.month;year = DateTime.year; den=DateTime.dayOfWeek; a[0]=hour/10%10; a[1]=hour%10; a[2]=minut/10%10; a[3]=minut%10; if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;} a[5]=data%10; if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;} a[7]=mon%10; if(millis()-times<500){dp=1;}else{dp=0;} if(old_sec!=secon){old_sec=secon;times=millis();} delay(100); } ISR(TIMER1_COMPA_vect){ switch (i) { // Q1 case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 0; anod();break; // Q2 case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 1; anod();break; // Q3 case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 2; anod();break; // Q4 case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 3; anod();break; // Q5 case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 4; anod();break; // Q6 case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 5; anod();break; // Q7 case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 6; anod();break; // Q8 case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 7; anod();break; } i++;if (i > 7) {i = 0;} } void segment() { switch (segm) { // A B C D E F G case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0 case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1 case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2 case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3 case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4 case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5 case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6 case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7 case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8 case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9 case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто } } void anod() { switch (an) { case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break; case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break; case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; } } void ch(int pin, int logic) { digitalWrite(pin, logic); }
Без изменений
// 19 === SCL
// 20 === SDA
//// Катоды
#define SEG_A 28
#define SEG_B 29
#define SEG_C 30
#define SEG_D 31
#define SEG_E 23
#define SEG_F 22
#define SEG_G 21
#define SEG_DP 20
//// Аноды
#define AN_Q1 3
#define AN_Q2 2
#define AN_Q3 1
#define AN_Q4 0
#define AN_Q5 24
#define AN_Q6 25
#define AN_Q7 26
#define AN_Q8 27
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
DS3231 clock;RTCDateTime DateTime;
long oldPosition = -999, newPosition, times;
int a[8],segm,i,an, dp1,dp2;
int old_sec,dp;
int hour,minut,secon,data,mon,year,den,temp;
void setup() {
Wire.begin();
clock.begin();
// clock.setDateTime(2023, 8, 26, 20, 40, 0);
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
// (8000000/((300+1)x64))=415.28239202658 Hz
OCR1A = 300;
TCCR1B |= (1 << WGM12);
// Prescaler 64
TCCR1B |= (1 << CS11) | (1 << CS10);
TIMSK |= (1 << OCIE1A);
sei();
pinMode(SEG_A, OUTPUT);
pinMode(SEG_B, OUTPUT);
pinMode(SEG_C, OUTPUT);
pinMode(SEG_D, OUTPUT);
pinMode(SEG_E, OUTPUT);
pinMode(SEG_F, OUTPUT);
pinMode(SEG_G, OUTPUT);
pinMode(SEG_DP, OUTPUT);
pinMode(AN_Q1, OUTPUT);
pinMode(AN_Q2, OUTPUT);
pinMode(AN_Q3, OUTPUT);
pinMode(AN_Q4, OUTPUT);
pinMode(AN_Q5, OUTPUT);
pinMode(AN_Q6, OUTPUT);
pinMode(AN_Q7, OUTPUT);
pinMode(AN_Q8, OUTPUT);
// pinMode (EXIT,INPUT_PULLUP);
}
void loop() {
DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second;
data = DateTime.day;mon = DateTime.month;year = DateTime.year;
den=DateTime.dayOfWeek;
a[0]=hour/10%10;
a[1]=hour%10;
a[2]=minut/10%10;
a[3]=minut%10;
if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;}
a[5]=data%10;
if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;}
a[7]=mon%10;
if(millis()-times<500){dp=1;}else{dp=0;}
if(old_sec!=secon){old_sec=secon;times=millis();}
delay(100);
}
ISR(TIMER1_COMPA_vect){
switch (i) {
/// SMALL
// Q5
case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 0; anod();break;
// Q6
case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 1; anod();break;
// Q7
case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 2; anod();break;
// Q8
case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 3; anod();break;
/// BIG
// Q1
case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 4; anod();break;
// Q2
case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 5; anod();break;
// Q3
case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 6; anod();break;
// Q4
case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 7; anod();break;
}
i++;if (i > 7) {i = 0;}
}
void segment() {
switch (segm) {
// A B C D E F G
case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0
case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1
case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2
case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3
case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4
case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5
case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6
case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7
case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8
case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9
case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто
}
}
void anod() {
switch (an) {
case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break;
case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break;
case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break;
}
}
void ch(int pin, int logic) {
digitalWrite(pin, logic);
}// 19 === SCL // 20 === SDA //// Катоды #define SEG_A 28 #define SEG_B 29 #define SEG_C 30 #define SEG_D 31 #define SEG_E 23 #define SEG_F 22 #define SEG_G 21 #define SEG_DP 20 //// Аноды #define AN_Q1 3 #define AN_Q2 2 #define AN_Q3 1 #define AN_Q4 0 #define AN_Q5 24 #define AN_Q6 25 #define AN_Q7 26 #define AN_Q8 27 #include <Wire.h> #include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip DS3231 clock;RTCDateTime DateTime; long oldPosition = -999, newPosition, times; int a[8],segm,i,an, dp1,dp2; int old_sec,dp; int hour,minut,secon,data,mon,year,den,temp; void setup() { Wire.begin(); clock.begin(); // clock.setDateTime(2023, 8, 26, 20, 40, 0); cli(); TCCR1A = 0; TCCR1B = 0; TCNT1 = 0; // (8000000/((300+1)x64))=415.28239202658 Hz OCR1A = 300; TCCR1B |= (1 << WGM12); // Prescaler 64 TCCR1B |= (1 << CS11) | (1 << CS10); TIMSK |= (1 << OCIE1A); sei(); pinMode(SEG_A, OUTPUT); pinMode(SEG_B, OUTPUT); pinMode(SEG_C, OUTPUT); pinMode(SEG_D, OUTPUT); pinMode(SEG_E, OUTPUT); pinMode(SEG_F, OUTPUT); pinMode(SEG_G, OUTPUT); pinMode(SEG_DP, OUTPUT); pinMode(AN_Q1, OUTPUT); pinMode(AN_Q2, OUTPUT); pinMode(AN_Q3, OUTPUT); pinMode(AN_Q4, OUTPUT); pinMode(AN_Q5, OUTPUT); pinMode(AN_Q6, OUTPUT); pinMode(AN_Q7, OUTPUT); pinMode(AN_Q8, OUTPUT); // pinMode (EXIT,INPUT_PULLUP); } void loop() { DateTime = clock.getDateTime();hour = DateTime.hour;minut = DateTime.minute;secon = DateTime.second; data = DateTime.day;mon = DateTime.month;year = DateTime.year; den=DateTime.dayOfWeek; a[0]=hour/10%10; a[1]=hour%10; a[2]=minut/10%10; a[3]=minut%10; if(data/10%10==0){a[4]=10;}else{a[4]=data/10%10;} a[5]=data%10; if(mon/10%10==0){a[6]=10;}else{a[6]=mon/10%10;} a[7]=mon%10; if(millis()-times<500){dp=1;}else{dp=0;} if(old_sec!=secon){old_sec=secon;times=millis();} delay(100); } ISR(TIMER1_COMPA_vect){ switch (i) { /// SMALL // Q5 case 4: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[4];ch(SEG_DP,1); segment(); an = 0; anod();break; // Q6 case 5: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[5];ch(SEG_DP,1); segment(); an = 1; anod();break; // Q7 case 6: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[6];ch(SEG_DP,1); segment(); an = 2; anod();break; // Q8 case 7: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[7];ch(SEG_DP,1); segment(); an = 3; anod();break; /// BIG // Q1 case 0: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[0];ch(SEG_DP,1); segment(); an = 4; anod();break; // Q2 case 1: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[1];ch(SEG_DP,dp); segment(); an = 5; anod();break; // Q3 case 2: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[2];ch(SEG_DP,dp); segment(); an = 6; anod();break; // Q4 case 3: segm = 10; segment(); an = 10; anod(); delayMicroseconds(200);segm = a[3];ch(SEG_DP,1); segment(); an = 7; anod();break; } i++;if (i > 7) {i = 0;} } void segment() { switch (segm) { // A B C D E F G case 0: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 1); break; // 0 case 1: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 1 case 2: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 1); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 1); ch(SEG_G, 0); break; // 2 case 3: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 0); break; // 3 case 4: ch(SEG_A, 1); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 4 case 5: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 5 case 6: ch(SEG_A, 0); ch(SEG_B, 1); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 6 case 7: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // 7 case 8: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 0); ch(SEG_F, 0); ch(SEG_G, 0); break; // 8 case 9: ch(SEG_A, 0); ch(SEG_B, 0); ch(SEG_C, 0); ch(SEG_D, 0); ch(SEG_E, 1); ch(SEG_F, 0); ch(SEG_G, 0); break; // 9 case 10: ch(SEG_A, 1); ch(SEG_B, 1); ch(SEG_C, 1); ch(SEG_D, 1); ch(SEG_E, 1); ch(SEG_F, 1); ch(SEG_G, 1); break; // пусто } } void anod() { switch (an) { case 0: ch(AN_Q1, 1); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 1: ch(AN_Q1, 0); ch(AN_Q2, 1); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 2: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 1); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 3: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 1); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 4: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 1); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 5: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 1); ch(AN_Q7, 0); ch(AN_Q8, 0); break; case 6: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 1); ch(AN_Q8, 0); break; case 7: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 1); break; case 10: ch(AN_Q1, 0); ch(AN_Q2, 0); ch(AN_Q3, 0); ch(AN_Q4, 0); ch(AN_Q5, 0); ch(AN_Q6, 0); ch(AN_Q7, 0); ch(AN_Q8, 0); break; } } void ch(int pin, int logic) { digitalWrite(pin, logic); }
Теперь все хорошо,0 бы убрать в десятках часов
Страницы Назад 1 … 8 9 10 11 12 … 17 Далее
Чтобы отправить ответ, вы должны войти или зарегистрироваться
forum.rcl-radio.ru → Новые идеи для проектов Arduino → Часы с календарем
Форум работает на PunBB, при поддержке Informer Technologies, Inc
|
|
{kind=link}