Тема: Измеритель фазы
Здравствуйте
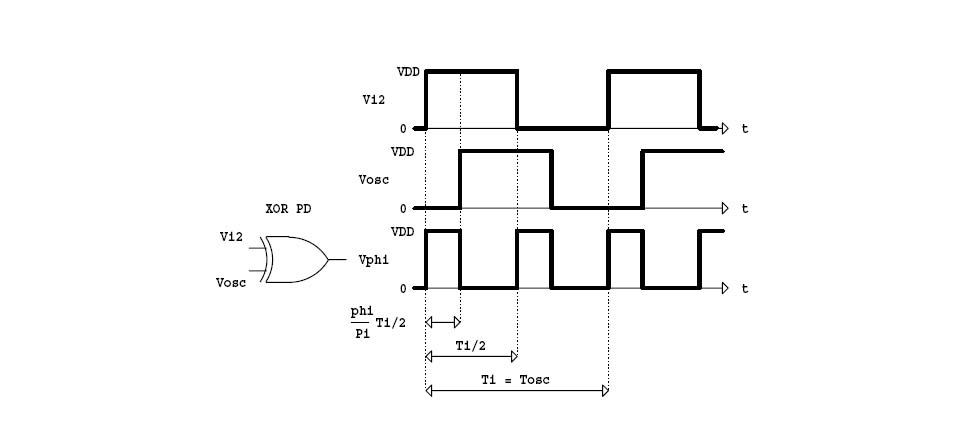
Почему чтение на ЖК-дисплее скачет на 3.6 градуса (не меняется плавно а через 3.6 градуса , 100, 103.6, 107.2 ...) и как это исправить. Выход генератора PB7 подключен к входу фазометра PA7, кнопки предназначены для изменения длительности импульсов, пропорциональной фазовому сдвигу.
HardwareTimer pwmtimer4(4);
#include <LiquidCrystal.h>
#include "EmonLib.h"
#include <EEPROM.h>
LiquidCrystal lcd(PA0, PA1, PA2, PA3, PA4, PA5);
///////////
int pin = PA7; // input
float rads = 57.29577951; // 1 radian = approx 57 deg.
float degree = 360;
float frequency = 10000;
float nano = 1 * pow (10,-6); // Multiplication factor to convert nano seconds into seconds
// Define floats to contain calculations
float pf;
float angle;
float pf_max = 0;
float angle_max = 0;
int ctr;
/////////
int i;
int ovfi;
void setup() {
pinMode(pin, INPUT);// input
pinMode(PB7, PWM); //Tx
pinMode(PB14, INPUT_PULLUP);
pinMode(PB12, INPUT_PULLUP);
lcd.begin(16, 2);
EEPROM.read(500, (uint16*)&i);
}
void loop() {
/////////////////
for (ctr = 0; ctr <= 4; ctr++) // Perform 4 measurements then reset
{
// 1st line calculates the phase angle in degrees from differentiated time pulse
// Function COS uses radians not Degree's hence conversion made by dividing angle / 57.2958
angle = ((((pulseIn(pin, HIGH)) * nano)* degree)* frequency);
// pf = cos(angle / rads);
if (angle > angle_max) // Test if the angle is maximum angle
{
angle_max = angle; // If maximum record in variable "angle_max"
pf_max = cos(angle_max / rads); // Calc PF from "angle_max"
}
}
if (angle_max > 360) // If the calculation is higher than 360 do following...
{
angle_max = 0; // assign the 0 to "angle_max"
pf_max = 1; // Assign the Unity PF to "pf_max"
}
if (angle_max == 0) // If the calculation is higher than 360 do following...
{
angle_max = 0; // assign the 0 to "angle_max"
pf_max = 1; // Assign the Unity PF to "pf_max"
}
Serial.print(angle_max, 2); // Print the result
Serial.print(",");
Serial.println(pf_max, 2);
lcd.clear();
/*
lcd.setCursor(0,0);
lcd.print("PF=");
lcd.setCursor(4,0);
lcd.print(pf_max);
lcd.print(" ");
*/
lcd.setCursor(0, 0);
lcd.print("i =");
lcd.print(i);
lcd.setCursor(0,1);
lcd.print("Ph-Shift=");
lcd.setCursor(10,1);
lcd.print(angle_max);
lcd.print(" ");
//delay(500);
angle = 0; // Reset variables for next test
angle_max = 0;
//////////////////
ovfi = 10000 - i;
pwmtimer4.pause();
pwmtimer4.setPrescaleFactor(1);
pwmtimer4.setOverflow( 7200);
pwmtimer4.setCompare(TIMER_CH2, i );//step = 100/7200 = 0.0138 micro sec = 13.8
pwmtimer4.refresh();
pwmtimer4.resume();
if (digitalRead(PB12) == HIGH)
{
if (i < 7200)
// if (i < 25)
{
i++;
delay(10);
}
}
if (digitalRead(PB14) == HIGH)
{
if (i > 0)
{
i--;
delay(10);
}
}
EEPROM.write(500, i);
}