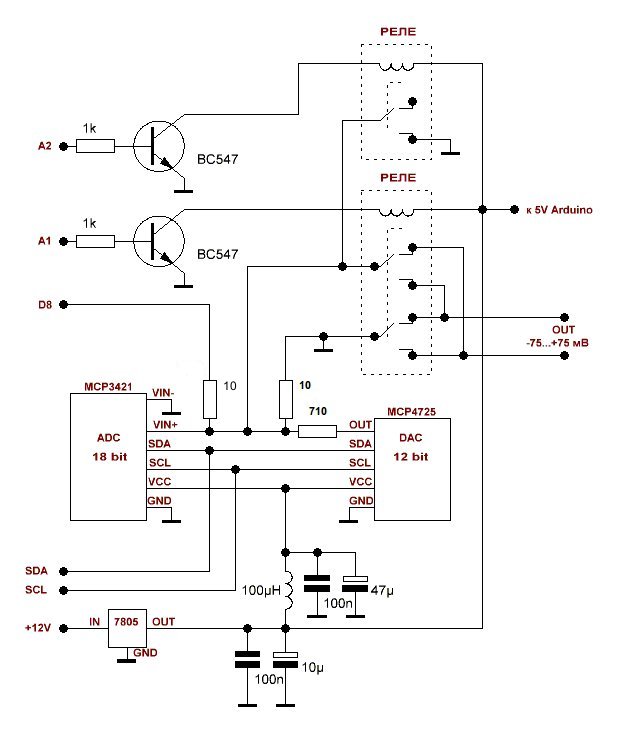
Тема: Имитатор сигналов преобразователей термоэлектрических
Имитация сигнала ТХА и TXK по ГОСТ Р 8.585-2001

Вы не вошли. Пожалуйста, войдите или зарегистрируйтесь.
forum.rcl-radio.ru → Тестирование скетчей → Имитатор сигналов преобразователей термоэлектрических
Страницы 1
Чтобы отправить ответ, вы должны войти или зарегистрироваться
Имитация сигнала ТХА и TXK по ГОСТ Р 8.585-2001
#define ADDR 0b1001000 // 0x48 MCP4725
#define ENC_SW 12 // encoder SW
#define ENC_CLK 10 // encoder CLK
#define ENC_DT 11 // encoder DT
#define SET 9 // BUTTON set tepmopara
#define INVERT A0 // BUTTON INVERT
#define T_NULL A3 // BUTTON NULL
#define OUT_NULL A2 // OUT NULL
#define DEL 8 // OUT DEL1
#define OUT_RELE A1 // OUT RELE_INVERT
#include <Wire.h>
#include <MCP3421.h>
#include <LiquidCrystal.h>
#include <Encoder.h>
#include <EEPROM.h>
#include <MsTimer2.h>
MCP3421 mcp;
LiquidCrystal lcd(7, 6, 2, 3, 4, 5);// RS,E,D4,D5,D6,D7 подключение LCD
Encoder myEnc(ENC_CLK, ENC_DT);
byte x1[8] = {0b11000,0b11000,0b00111,0b01000,0b01000,0b01000,0b00111,0b00000};
const float u_kall = 1.00223; // калибровка АЦП
const float pop1 = 0.00000; // калибровка 0
long dig,newPosition,oldPosition=-999;
float u,t,u_sum,u0,t_iz,u_iz,tt;
int i,out,w,set_t,del,w1,inv=0,out_old,t0,rej,reg_t,t_ok;
// XA K
const float a[]{0,2.5173462*10,-1.1662878,-1.08336338,-8.9773540/10,-3.7342377/10,-8.6632643/100,-1.0450598/100,-5.1920577/10000};
const float a1[]{0,2.508355*10,7.860106/100,-2.503131/10,8.315270/100,-1.228034/100,9.804036/10000,-4.413030/100000,1.057734/1000000,-1.052755*pow(10,-8)};
const float a2[]{-1.318058*100,4.830222*10,-1.646031,5.464731/100,-9.6550715/10000,8.802193/1000000,-3.110810/100000000};
// XK L
const float b[]{1.1573067/10000,1.5884573*10,4.0458554/100,0.3170064,0.1666128,5.146958/100,9.5288883/1000,1.0301283/1000,6.0654431/100000,1.5131878/1000000};
const float b1[]{7.2069422/1000,1.5775525*10,-0.2261183,9.4286756/1000,-3.5394655/10000,1.0050886/100000,-1.9323678/10000000,2.3816891/1000000000,-1.7130654*pow(10,-11),5.4857331*pow(10,-14)};
void setup(){
Serial.begin(9600);
Wire.begin();lcd.begin(16, 2);conf_ds1624();mcp.setConfig(3,3);lcd.createChar(0,x1);
pinMode(ENC_SW,INPUT);
pinMode(SET,INPUT_PULLUP);
pinMode(T_NULL,INPUT_PULLUP);
pinMode(INVERT,INPUT_PULLUP);
pinMode(OUT_RELE,OUTPUT);
pinMode(OUT_NULL,OUTPUT);
MsTimer2::set(1, to_Timer);MsTimer2::start();
lcd.setCursor(0,0);lcd.print("Calibrator");lcd.setCursor(0,1);lcd.print("temperature");
set_t=EEPROM.read(0);rej=EEPROM.read(1);t0=EEPROM.read(2);t_ok=EEPROM.read(3);
if(rej>1){rej=0;}if(t0>1){t0=0;}
digitalWrite(OUT_RELE,LOW);out=0;MCP4725(out);delay(1000);lcd.clear();
}
void loop(){
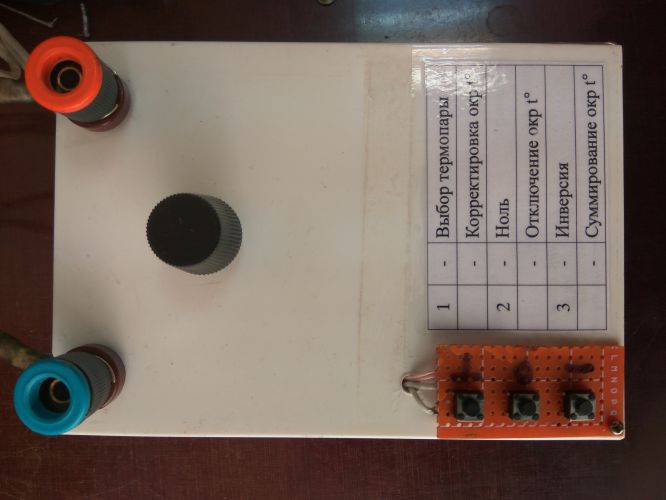
/////////// SET TERMOPARA
if(digitalRead(SET)==LOW&&digitalRead(ENC_SW)==HIGH){set_t++;if(set_t>3){set_t=0;}delay(200);w1=1;EEPROM.update(0,set_t);}
if(set_t==0){txa();del=0;}
if(set_t==1){txa();del=1;}
if(set_t==2){txk();del=0;}
if(set_t==3){txk();del=1;}
if(w1==1){w1=0;
if(del==1){pinMode(DEL,OUTPUT);digitalWrite(8,LOW);}
if(del==0){pinMode(DEL,INPUT);}}
///////////// rej
if(digitalRead(INVERT)==LOW&&digitalRead(ENC_SW)==LOW&&rej==0){rej=1;delay(200);EEPROM.update(1,rej);}
if(digitalRead(INVERT)==LOW&&digitalRead(ENC_SW)==LOW&&rej==1){rej=0;delay(200);EEPROM.update(1,rej);}
//////////// T_NULL
if(digitalRead(T_NULL)==LOW&&tt==0&&digitalRead(ENC_SW)==HIGH){tt=1;out_old=out;out=0;MCP4725(out);delay(200);}
if(digitalRead(T_NULL)==LOW&&tt==1&&digitalRead(ENC_SW)==HIGH){tt=0;out=out_old;MCP4725(out);delay(200);}
if(out==0){digitalWrite(OUT_NULL,HIGH);}else{digitalWrite(OUT_NULL,LOW);}
//////////// delete temp
if(digitalRead(T_NULL)==LOW&&digitalRead(ENC_SW)==LOW&&t0==0){t0=1;delay(200);EEPROM.update(2,t0);}
if(digitalRead(T_NULL)==LOW&&digitalRead(ENC_SW)==LOW&&t0==1){t0=0;delay(200);EEPROM.update(2,t0);}
//////////// okr temp
if(digitalRead(SET)==LOW&&digitalRead(ENC_SW)==LOW&®_t==0){reg_t=1;delay(200);}
if(digitalRead(SET)==LOW&&digitalRead(ENC_SW)==LOW&®_t==1){reg_t=0;delay(200);}
//////////// INVERT
if(digitalRead(INVERT)==LOW&&inv==1&&digitalRead(ENC_SW)==HIGH){inv=0;digitalWrite(OUT_RELE,LOW);out=0;MCP4725(out);delay(200);}
if(digitalRead(INVERT)==LOW&&inv==0&&digitalRead(ENC_SW)==HIGH){inv=1;digitalWrite(OUT_RELE,HIGH);out=0;MCP4725(out);delay(200);}
/////////// READ T
i++;
dig = mcp.readWire();u_iz = dig * 0.256 /131071*u_kall;u_sum=u_sum+u_iz;
if(i>=10){i=0;u=u_sum/10-pop1;u_sum=0;i=0;if(inv==1){u=u-2*u;}}
Serial.println(t_ok);
if(t0==0){t=ds1624_Read()+(t_ok-50)/10.00;}else{t=0;}
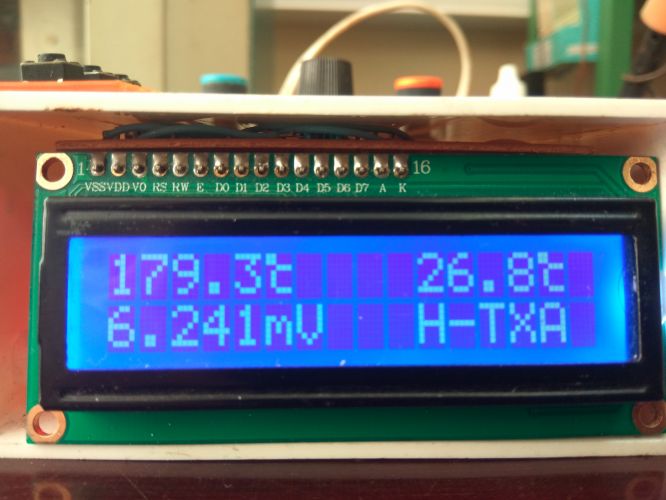
/////////// LCD
lcd.setCursor(0,0);
if(t_iz==10000){lcd.print("HIGH ");}
else if(t_iz==-1000){lcd.print("LOW ");}
else{lcd.print(t_iz,1);lcd.write((uint8_t)0);lcd.print(" ");
lcd.setCursor(7,0);if(tt==1){lcd.print("!");}else{lcd.print(" ");}
lcd.setCursor(8,0);if(inv==1){lcd.print("*");}else{lcd.print(" ");}}
lcd.setCursor(10,0);lcd.print(t,1);lcd.write((uint8_t)0);if(reg_t==1){lcd.print("* ");}else{lcd.print(" ");}
lcd.setCursor(0,1);
if(rej==0){lcd.print(u*1000,3);lcd.print("mV ");}
if(rej==1&&(set_t==0||set_t==1)){lcd.print(u*1000+t*0.0400,3);lcd.print("mV+ ");}
if(rej==1&&(set_t==2||set_t==3)){lcd.print(u*1000+t*0.0655,3);lcd.print("mV+ ");}
lcd.setCursor(10,1);if(del==0){lcd.print("H");}else{lcd.print("L");}
if(set_t==0||set_t==1){lcd.print("-TXA");}
if(set_t==2||set_t==3){lcd.print("-TXK");}
/////////// DAC
if(tt==0&®_t==0){
if (newPosition != oldPosition && digitalRead(ENC_SW)==HIGH){oldPosition = newPosition;
out=out+newPosition;myEnc.write(0);newPosition=0;w=1;
if(out<0){out=0;}if(out>4095){out=4095;}MCP4725(out);}
if (newPosition != oldPosition && digitalRead(ENC_SW)==LOW){oldPosition = newPosition;
out=out+newPosition*30;myEnc.write(0);newPosition=0;w=1;
if(out<0){out=0;}if(out>4095){out=4095;}MCP4725(out);}
}
// MCP4725(4000);
if(reg_t==1){
if (newPosition != oldPosition && digitalRead(ENC_SW)==HIGH){oldPosition = newPosition;
t_ok=t_ok+newPosition;myEnc.write(0);newPosition=0;w=1;EEPROM.update(3,t_ok);
if(t_ok<0){t_ok=0;}if(t_ok>100){t_ok=100;}}}
delay(100);
}// loop
void txa(){u0=u*1000+t*0.0400;// окружающая температура 0.0400 мВ на 1 гр.Цельсия от 0 до 40 гр.Цельсия для TXA(K)
if(u0<0){t_iz=(a[0]*pow(u0,0))+(a[1]*pow(u0,1))+(a[2]*pow(u0,2))+(a[3]*pow(u0,3))+(a[4]*pow(u0,4))+(a[5]*pow(u0,5))+(a[6]*pow(u0,6))+(a[7]*pow(u0,7))+(a[8]*pow(u0,8));}
if(u0>=0&&u0<=20.64){t_iz=(a1[0]*pow(u0,0))+(a1[1]*pow(u0,1))+(a1[2]*pow(u0,2))+(a1[3]*pow(u0,3))+(a1[4]*pow(u0,4))+(a1[5]*pow(u0,5))+(a1[6]*pow(u0,6))+(a1[7]*pow(u0,7))+(a1[8]*pow(u0,8))+(a1[9]*pow(u0,9));}
if(u0>20.64){t_iz=(a2[0]*pow(u0,0))+(a2[1]*pow(u0,1))+(a2[2]*pow(u0,2))+(a2[3]*pow(u0,3))+(a2[4]*pow(u0,4))+(a2[5]*pow(u0,5))+(a2[6]*pow(u0,6));}
if(u*1000<-6.35){t_iz=-1000;} if(u*1000>54.9){t_iz=10000;}}
void txk(){u0=u*1000+t*0.0655;// окружающая температура 0.06476 мВ на 1 гр.Цельсия от 0 до 40 гр.Цельсия для TXK(L)
if(u0<0){t_iz=(b[0]*pow(u0,0))+(b[1]*pow(u0,1))+(b[2]*pow(u0,2))+(b[3]*pow(u0,3))+(b[4]*pow(u0,4))+(b[5]*pow(u0,5))+(b[6]*pow(u0,6))+(b[7]*pow(u0,7))+(b[8]*pow(u0,8))+(b[9]*pow(u0,9));}
if(u0>=0){t_iz=(b1[0]*pow(u0,0))+(b1[1]*pow(u0,1))+(b1[2]*pow(u0,2))+(b1[3]*pow(u0,3))+(b1[4]*pow(u0,4))+(b1[5]*pow(u0,5))+(b1[6]*pow(u0,6))+(b1[7]*pow(u0,7))+(b1[8]*pow(u0,8))+(b1[9]*pow(u0,9));}
if(u*1000<-9.49){t_iz=-1000;} if(u*1000>66.47){t_iz=10000;}
}
void to_Timer(){newPosition = myEnc.read()/4;}
float ds1624_Read(){
Wire.beginTransmission(ADDR);
Wire.write(0xAA);
Wire.requestFrom(ADDR,2);
while(Wire.available()<2);
float value = Wire.read() + float(Wire.read()>>4)*0.0625;
Wire.endTransmission();
return value;
}
void conf_ds1624(){
Wire.beginTransmission(ADDR);
Wire.write(0xAC);
Wire.write(0x00);
Wire.endTransmission();
delay(100);
Wire.beginTransmission(ADDR);
Wire.write(0xEE);
Wire.endTransmission();
delay(50);
}
void MCP4725(int data){
byte buffer[3];
buffer[0] = 0b01000000;
// data=0;
// buffer[0] = 0b01100000; // запись в память ЦАП 0 В
buffer[1] = data >> 4;
buffer[2] = data << 4;
Wire.beginTransmission(0x60);
Wire.write(buffer[0]);
Wire.write(buffer[1]);
Wire.write(buffer[2]);
Wire.endTransmission();
} Страницы 1
Чтобы отправить ответ, вы должны войти или зарегистрироваться
forum.rcl-radio.ru → Тестирование скетчей → Имитатор сигналов преобразователей термоэлектрических
Форум работает на PunBB, при поддержке Informer Technologies, Inc
|
|