Re: Иммитатор сигнала термопар (ТХА, ТХК, ТППs, -10...+100 mV)
Создал новую учетную запись и все прочие. Компиляция и запись со второй попытки прошли успешно, соберу в схему посмотрю что и как. А пока скрин.
Вы не вошли. Пожалуйста, войдите или зарегистрируйтесь.
forum.rcl-radio.ru → Разное → Иммитатор сигнала термопар (ТХА, ТХК, ТППs, -10...+100 mV)
Создал новую учетную запись и все прочие. Компиляция и запись со второй попытки прошли успешно, соберу в схему посмотрю что и как. А пока скрин.
Похоже у меня дисплей тоже, прислали с SSD1306. Но беда в том что пк не видит ардуинку.Что можно сделать? Искать подходящий дисплей? или можно как то справится.
U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE|U8G_I2C_OPT_DEV_0); // I2C / TWI
Перезалил, ордуинка увиделась. Но на экране все тоже.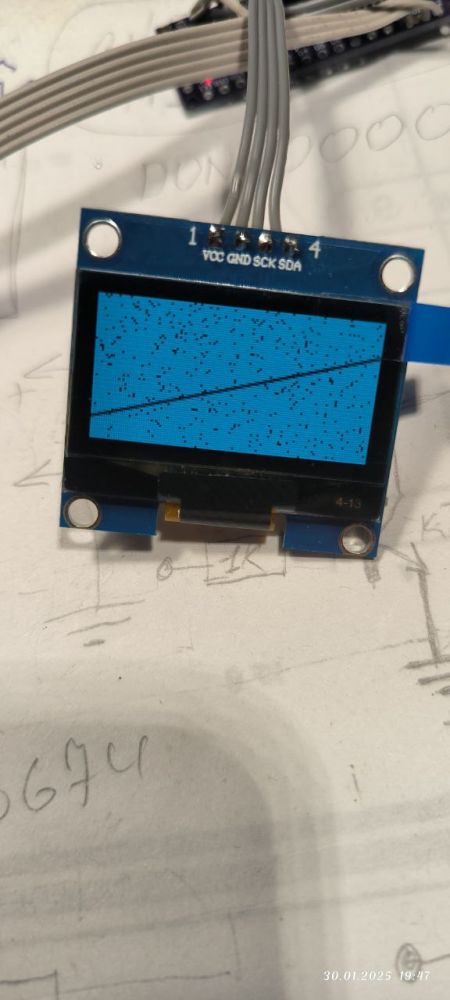
А вот сам дисплей.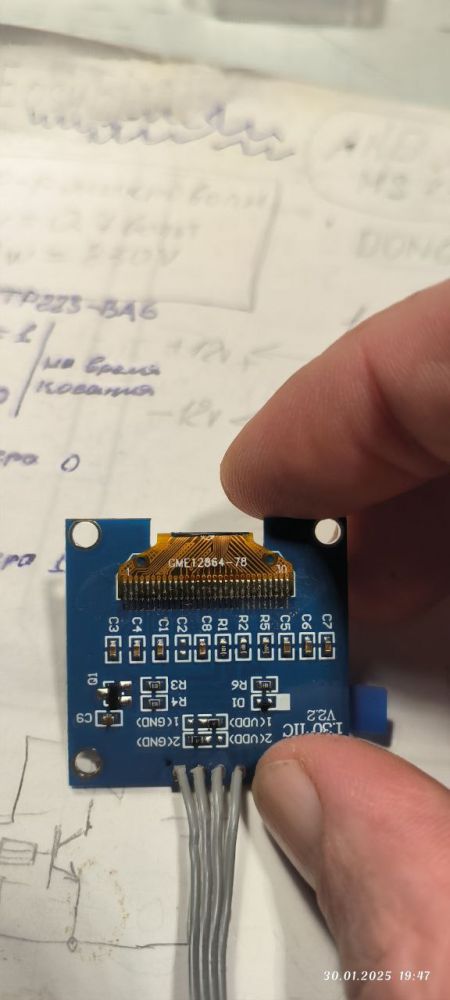
Делал так, скопировал с форума, в скетче строку удалил, А новую вставил. Пере прошил. Еще, пробовал другую библиотеку. вывод тот же.
В такой комплектации должен работать или все таки нужно собрать полностью.
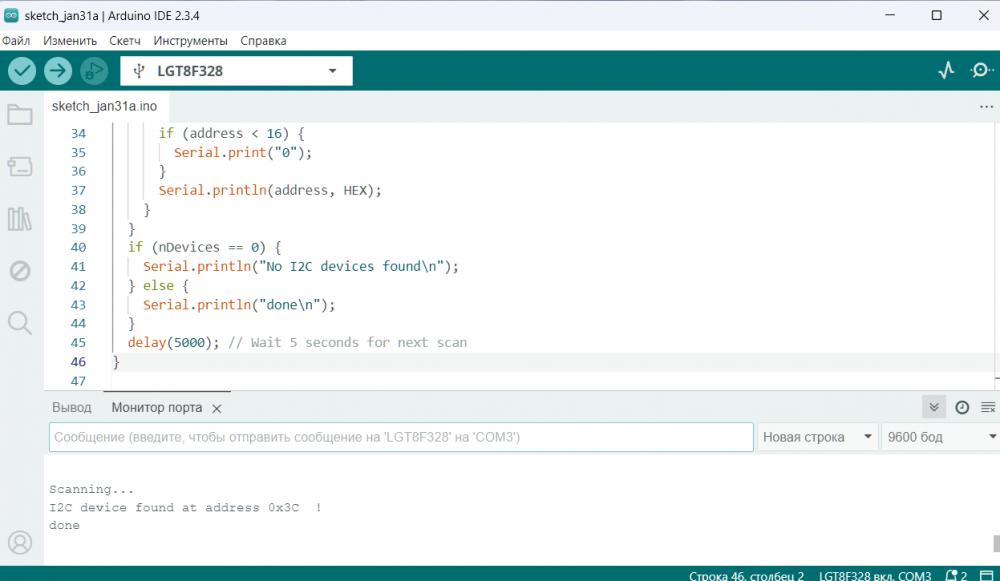
Загрузите I2C сканер, посмотрите определяется ли адрес дисплея
#include <Wire.h>
void setup() {
Wire.begin();
Serial.begin(9600);
while (!Serial); // Leonardo: wait for serial monitor
Serial.println("\nI2C Scanner");
}
void loop() {
int nDevices = 0;
Serial.println("Scanning...");
for (byte address = 1; address < 127; ++address) {
// The i2c_scanner uses the return value of
// the Write.endTransmisstion to see if
// a device did acknowledge to the address.
Wire.beginTransmission(address);
byte error = Wire.endTransmission();
if (error == 0) {
Serial.print("I2C device found at address 0x");
if (address < 16) {
Serial.print("0");
}
Serial.print(address, HEX);
Serial.println(" !");
++nDevices;
} else if (error == 4) {
Serial.print("Unknown error at address 0x");
if (address < 16) {
Serial.print("0");
}
Serial.println(address, HEX);
}
}
if (nDevices == 0) {
Serial.println("No I2C devices found\n");
} else {
Serial.println("done\n");
}
delay(5000); // Wait 5 seconds for next scan
}По ходуду определился.
#define NULLL 3248*2
#define MV30 5052*2
#include <Wire.h>
#include <EEPROM.h>
#include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip
#include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip
#include <U8glib.h>
#include <OneWire.h> // http://rcl-radio.ru/wp-content/uploads/2018/07/OneWire.zip
#include <iarduino_KB.h> // https://github.com/tremaru/iarduino_KB.git
iarduino_KB KB(8,7,6,5, 4,3,2);
Encoder myEnc(11, 12);// DT, CLK
OneWire ds1(13); // Вход датчика 18b20
U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_DEV_0|U8G_I2C_OPT_NO_ACK|U8G_I2C_OPT_FAST); // Fast I2C / TWI
long oldPosition = 999,newPosition, times, times1,times_ds=10000,times14,save,times_off,k_0,k_30;
bool w,ttt=0;
byte ok,reg;
int menu;
float out = 0,e,temp,t_ok,t_ok_mv,temp_old,k_ok;
long code[5],ccc;
int i,i1,kb;
/// xa
float a[] = {0,3.9450128025*pow(10,-2),2.3622373598*pow(10,-5),-3.2858906784*pow(10,-7),-4.9904828777*pow(10,-9),
6.7509059173*pow(10,-11),-5.7410327428*pow(10,-13),-3.1088872894*pow(10,-15),-1.0451609365*pow(10,-17),
-1.9889266878*pow(10,-20), -1.6322697486*pow(10,-23)};
float b[] = {-1.7600413686*pow(10, -2),3.8921204975 *pow(10, -2),1.8558770032 *pow(10, -5),-9.9457592874 *pow(10, -8),
3.1840945719 *pow(10, -10),-5.6072844889 *pow(10, -13),5.6075059059 *pow(10, -16),-3.2020720003 *pow(10, -19),
9.7151147152 *pow(10, -23),-1.2104721275 *pow(10, -26)};
float c[] = {1.185976 *pow(10, -1),-1.183432 *pow(10, -4)};
float logg=2.718281828;int u=30;
/// xk
float a1[] = {-4.1626930*pow(10,-6),6.3310880*pow(10,-2),6.0118088*pow(10,-5),-7.9469796*pow(10,-8),9.3101891*pow(10,-11),
-2.4299630*pow(10,-14),-2.6547176*pow(10,-16),4.4332477*pow(10,-19),-2.1172626*pow(10,-22)};
// pps
//Для термопары типа S
float a2[] = {0, 5.40313308631*pow(10,-3),1.25934289740*pow(10,-5),-2.32477968689*pow(10,-8),3.22028823036*pow(10,-11),
-3.31465196389*pow(10,-14),2.55744251786*pow(10,-17),-1.25068871393*pow(10,-20),2.71443176145*pow(10,-24)};
float b2[] = {1.32900444085,3.34509311344*pow(10,-3),6.54805192818*pow(10,-6),-1.64856259209*pow(10,-9),1.29989605174*pow(10,-14)};
float c2[] = {1.46628232636*pow(10,2),-2.58430516752*pow(10,-1),1.63693574641*pow(10,-4),-3.30439046987*pow(10,-8),-9.43223690612*pow(10,-15)};
void setup(){
Serial.begin(9600);
delay(500);
pinMode(10,INPUT);// encoder button
// TIMER_1 D9 OUTPUT
DDRB = 1 << PB1; // D9 output pwm
noInterrupts();
TCCR1A=0;TCCR1B=0;
TCCR1A = 1 << COM1A1 | 1 << WGM11;
TCCR1B = 1 << WGM13 | 1 << WGM12 | 1 << CS10;
ICR1 = 40000;
MsTimer2::set(2, to_Timer);MsTimer2::start();
k_ok = (EEPROM.read(10)<<8)+EEPROM.read(11);
k_0 = (EEPROM.read(20)<<8)+EEPROM.read(21);
k_30 = (EEPROM.read(30)<<8)+EEPROM.read(31);
ok=EEPROM.read(0);menu=EEPROM.read(1);
if(menu>100){menu=0;}
times=float(MV30-1500+k_30)/30.0*out+NULLL-1500+k_0;
OCR1A = times;
interrupts();
KB.begin(KB3);
// if(ok==1||ok==2){temp = dsRead(0)*k_ok/100;}else{temp=0;}
}
void loop(){
if(digitalRead(10)==LOW){times_off=millis();}
if(KB.check(KEY_DOWN )){ kb=1;
if(digitalRead(10)==HIGH && KB.getNum==14){i=0;ccc=0;for(i1=0;i1<5;i1++){code[i]=0;}kb=0;temp=0;delay(200);}
if(digitalRead(10)==HIGH && KB.getNum==15){delay(200);kb=0;temp=ccc;i=0;ccc=0;for(i1=0;i1<5;i1++){code[i]=0;}}
if(digitalRead(10)==LOW && KB.getNum==1){menu=0;arr();}
if(digitalRead(10)==LOW && KB.getNum==2){menu=1;arr();}
if(digitalRead(10)==LOW && KB.getNum==3){menu=2;arr();}
if(digitalRead(10)==LOW && KB.getNum==4){menu=3;arr();}
if(digitalRead(10)==LOW && KB.getNum==5){menu=5;delay(200);}
if(digitalRead(10)==LOW && KB.getNum==6){menu=6;delay(200);}
if(digitalRead(10)==LOW && KB.getNum==7){ok=0;w=1;times1=millis();kb=0;temp=ccc;i=0;ccc=0;for(i1=0;i1<5;i1++){code[i]=0;}delay(200);}
if(digitalRead(10)==LOW && KB.getNum==8){ok=1;w=1;times1=millis();kb=0;temp=ccc;i=0;ccc=0;for(i1=0;i1<5;i1++){code[i]=0;}delay(200);}
if(digitalRead(10)==LOW && KB.getNum==9){ok=2;w=1;times1=millis();kb=0;temp=ccc;i=0;ccc=0;for(i1=0;i1<5;i1++){code[i]=0;}delay(200);}
if(digitalRead(10)==LOW && KB.getNum==0&&ttt==0){kb=0;KB.getNum=500;ttt=1;Serial.println(ttt);delay(500);}
if(digitalRead(10)==LOW && KB.getNum==0&&ttt==1){kb=0;KB.getNum=500;ttt=0;Serial.println(ttt);delay(500);}
if(digitalRead(10)==LOW && KB.getNum==14){menu=14;delay(200);}
if(menu==14&&KB.getNum==15){EEPROM.update(10,highByte(int(k_ok)));EEPROM.update(11,lowByte(int(k_ok)));save=millis();delay(200);}
if(menu==5&&KB.getNum==15){EEPROM.update(20,highByte(int(k_0)));EEPROM.update(21,lowByte(int(k_0)));save=millis();delay(200);}
if(menu==6&&KB.getNum==15){EEPROM.update(30,highByte(int(k_30)));EEPROM.update(31,lowByte(int(k_30)));save=millis();delay(200);}
////////////////////////////////////////////////////////////
if(KB.getNum<10&&i<5&&digitalRead(10)==HIGH){
code[i] = KB.getNum;delay(200);
switch(i){
case 0: ccc = code[0];break;
case 1: ccc = code[0]*10 + code[1];break;
case 2: ccc = code[0]*100 + code[1]*10 + code[2];break;
case 3: ccc = code[0]*1000 + code[1]*100 + code[2]*10 + code[3];break;
case 4: ccc = code[0]*10000 + code[1]*1000 + code[2]*100 + code[3]*10 + code[4];break;
}
i++;if(i>3){i=4;}
if(menu==0){if(ccc>13720){ccc=13720;}}
if(menu==1){if(ccc>8000){ccc=8000;}}
if(menu==2){if(ccc>17680){ccc=17680;}}
if(menu==3){if(ccc>10000){ccc=10000;}}
}
}
if(millis()-times_ds>10000){t_ok=dsRead(0)*k_ok/1000;times_ds=millis();}
if(menu==0){
if(newPosition != oldPosition){oldPosition = newPosition;pos();
if(digitalRead(10)==LOW){temp=temp+newPosition*50;}else{temp=temp+newPosition;}times_off=millis();
myEnc.write(0);newPosition=0;if(temp<-2700){temp=-2700;}if(temp>13720){temp=13720;}}
t_ok_mv = (t_ok-20)*0.0405+0.798;
if(ok==0){out=fun_xa(temp/10.0);}
if(ok>0){out=fun_xa(temp/10.0)-t_ok_mv;}
if(ttt==1){out=0;}
OCR1A=float(MV30-1500+k_30)/30.0*out+NULLL-1500+k_0;
if(millis()-times_off>300000){u8g.firstPage();do { } while( u8g.nextPage() );}
else{
u8g.firstPage();do {
u8g.setFont(u8g_font_profont29r);
u8g.setPrintPos(0, 20);
if(ttt==1){u8g.setFont(u8g_font_profont17r);u8g.drawStr(10,40,"Out=0 mV");}
else{
if(kb==0){u8g.print(temp/10.0,1);}
if(kb==1){u8g.print(ccc/10.0,1);}
u8g.setPrintPos(0, 45);
if(ok==2){u8g.print(out+t_ok_mv,3);}
else{u8g.print(out,3);}
u8g.setFont(u8g_font_profont17r);u8g.drawStr(5,64,"TXA");u8g.drawStr(100,20,"*C");
u8g.drawStr(100,45,"mV");
u8g.setPrintPos(75, 64);if(ok>0){u8g.print(t_ok,1);}
if(ok==2){;u8g.drawStr(60,64,"+");}
}
}
while( u8g.nextPage() );
}}
if(menu==1){
if(newPosition != oldPosition){oldPosition = newPosition;pos();
if(digitalRead(10)==LOW){temp=temp+newPosition*50;}else{temp=temp+newPosition;}times_off=millis();
myEnc.write(0);newPosition=0;if(temp<-2000){temp=-2000;}if(temp>8000){temp=8000;}}
t_ok_mv = (t_ok-20)*0.0661+1.290;
if(ok==0){out=fun_xk(temp/10.0);}
if(ok>0){out=fun_xk(temp/10.0)-t_ok_mv;}
if(ttt==1){out=0;}
OCR1A=float(MV30-1500+k_30)/30.0*out+NULLL-1500+k_0;
if(millis()-times_off>300000){u8g.firstPage();do { } while( u8g.nextPage() );}
else{
u8g.firstPage();do {
u8g.setFont(u8g_font_profont29r);
u8g.setPrintPos(0, 20);
if(ttt==1){u8g.setFont(u8g_font_profont17r);u8g.drawStr(10,40,"Out=0 mV");}
else{
if(kb==0){u8g.print(temp/10.0,1);}
if(kb==1){u8g.print(ccc/10.0,1);}
u8g.setPrintPos(0, 45);
if(ok==2){u8g.print(out+t_ok_mv,3);}
else{u8g.print(out,3);}
u8g.setFont(u8g_font_profont17r);u8g.drawStr(5,64,"TXK");u8g.drawStr(100,20,"*C");
u8g.drawStr(100,45,"mV");
u8g.setPrintPos(75, 64);if(ok>0){u8g.print(t_ok,1);}
if(ok==2){;u8g.drawStr(60,64,"+");}
}
}
while( u8g.nextPage() );
}}
if(menu==2){
if(newPosition != oldPosition){oldPosition = newPosition;pos();
if(digitalRead(10)==LOW){temp=temp+newPosition*50;}else{temp=temp+newPosition;}times_off=millis();
myEnc.write(0);newPosition=0;if(temp<-500){temp=-500;}if(temp>17680){temp=17680;}}
t_ok_mv = (t_ok-20)*0.006+0.113;
if(ttt==1){out=0;}
if(ok==0){out=fun_pps(temp/10.0);}
if(ok>0){out=fun_pps(temp/10.0)-t_ok_mv;}
OCR1A=float(MV30-1500+k_30)/30.0*out+NULLL-1500+k_0;
if(millis()-times_off>300000){u8g.firstPage();do { } while( u8g.nextPage() );}
else{
u8g.firstPage();do {
u8g.setFont(u8g_font_profont29r);
u8g.setPrintPos(0, 20);
if(ttt==1){u8g.setFont(u8g_font_profont17r);u8g.drawStr(10,40,"Out=0 mV");}
else{
if(kb==0){u8g.print(temp/10.0,1);}
if(kb==1){u8g.print(ccc/10.0,1);}
u8g.setPrintPos(0, 45);
if(ok==2){u8g.print(out+t_ok_mv,3);}
else{u8g.print(out,3);}
u8g.setFont(u8g_font_profont17r);u8g.drawStr(5,64,"TPPs");u8g.drawStr(100,20,"*C");
u8g.drawStr(100,45,"mV");
u8g.setPrintPos(75, 64);if(ok>0){u8g.print(t_ok,1);}
if(ok==2){;u8g.drawStr(60,64,"+");}
}
}
while( u8g.nextPage() );
}}
if(menu==3){
if(newPosition != oldPosition){oldPosition = newPosition;pos();
if(digitalRead(10)==LOW){temp=temp+newPosition*30;}else{temp=temp+newPosition;}times_off=millis();
myEnc.write(0);newPosition=0;if(temp<-1000){temp=-1000;}if(temp>10000){temp=10000;}reg=1;}
out=temp;
if(ttt==1){out=0;}
OCR1A=float(MV30-1500+k_30)/30.0*out/100+NULLL-1500+k_0;
if(reg==1){reg=0;Serial.println(OCR1A);}
if(millis()-times_off>300000){u8g.firstPage();do { } while( u8g.nextPage() );}
else{
u8g.firstPage();do {
u8g.setFont(u8g_font_profont29r);
u8g.setPrintPos(5, 20);
if(ttt==1){u8g.setFont(u8g_font_profont17r);u8g.drawStr(10,40,"Out=0 mV");}
else{
if(kb==0){u8g.print(temp/100.0,2);}
if(kb==1){u8g.print(ccc/100.0,2);}
u8g.setFont(u8g_font_profont17r);if(kb==0){u8g.drawStr(100,20,"mV");}
}
}
while( u8g.nextPage() );
}}
/// kall 0
if(menu==5){
if(newPosition != oldPosition){oldPosition = newPosition;pos();
if(digitalRead(10)==LOW){k_0=k_0+newPosition*50;}else{k_0=k_0+newPosition;}myEnc.write(0);newPosition=0;
if(k_0<0){k_0=0;}if(k_0>3000){k_0=3000;}}
OCR1A=float(MV30-1500+k_30)/30.0*0/100+NULLL-1500+k_0;
u8g.firstPage();do {
u8g.setFont(u8g_font_profont29r);
u8g.setPrintPos(5, 20);u8g.print(k_0);
u8g.setFont(u8g_font_profont17r);
if(millis()-save<1000){u8g.drawStr(5,60,"SAVE");}
else{u8g.drawStr(5,60,"kall 0");}
}
while( u8g.nextPage() );
}
/// kall 30
if(menu==6){
if(newPosition != oldPosition){oldPosition = newPosition;pos();
if(digitalRead(10)==LOW){k_30=k_30+newPosition*50;}else{k_30=k_30+newPosition;}myEnc.write(0);newPosition=0;
if(k_30<0){k_30=0;}if(k_30>3000){k_30=3000;}}
OCR1A=float(MV30-1500+k_30)/30.0*3000/100+NULLL-1500+k_0;
u8g.firstPage();do {
u8g.setFont(u8g_font_profont29r);
u8g.setPrintPos(5, 20);u8g.print(k_30);
u8g.setFont(u8g_font_profont17r);
if(millis()-save<1000){u8g.drawStr(5,60,"SAVE");}
else{u8g.drawStr(5,60,"kall 30");}
}
while( u8g.nextPage() );
}
if(menu==14){
if(newPosition != oldPosition){oldPosition = newPosition;pos();
k_ok=k_ok+newPosition;myEnc.write(0);t_ok=dsRead(0)*k_ok/1000;newPosition=0;if(k_ok<800){k_ok=800;}if(k_ok>1200){k_ok=1200;}}
u8g.firstPage();do {
if(millis()-times14>1000){t_ok=dsRead(0)*k_ok/1000;times14=millis();}
u8g.setFont(u8g_font_profont29r);
u8g.setPrintPos(5, 20);u8g.print(t_ok,1);
u8g.setPrintPos(5, 45);u8g.print(k_ok/1000,3);
u8g.setFont(u8g_font_profont17r);
if(millis()-save<1000){u8g.drawStr(5,60,"SAVE");}
else{u8g.drawStr(5,60,"kall t_ok");}
}
while( u8g.nextPage() );
}
if(millis()-times1>5000 && w==1){EEPROM.update(0,ok);EEPROM.update(1,menu);w=0;}
}
float fun_xa(float t){
//термопары типа К -270...1372 (ХA)
if(t<=0){
e=(a[0]*pow(t,0))+(a[1]*pow(t,1))+(a[2]*pow(t,2))+(a[3]*pow(t,3))+(a[4]*pow(t,4))+(a[5]*pow(t,5))+(a[6]*pow(t,6))+(a[7]*pow(t,7))+(a[8]*pow(t,8))+(a[9]*pow(t,9))+(a[10]*pow(t,10));}
if(t>0){
e=(b[0]*pow(t,0))+(b[1]*pow(t,1))+(b[2]*pow(t,2))+(b[3]*pow(t,3))+(b[4]*pow(t,4))+(b[5]*pow(t,5))+(b[6]*pow(t,6))+(b[7]*pow(t,7))+(b[8]*pow(t,8))+(b[9]*pow(t,9)+(c[0]*pow(logg,c[1]*pow(t-126.9686,2))));}
return e;
}
float fun_xk(float t){
//термопары типа L -200...800 (ХК)
e=(a1[0]*pow(t,0))+(a1[1]*pow(t,1))+(a1[2]*pow(t,2))+(a1[3]*pow(t,3))+(a1[4]*pow(t,4))+(a1[5]*pow(t,5))+(a1[6]*pow(t,6))+(a1[7]*pow(t,7))+(a1[8]*pow(t,8));
return e;
}
// pps -50...+1768 (PPs)
float fun_pps(float t){
if(t<=1064){
e=(a2[0]*pow(t,0))+(a2[1]*pow(t,1))+(a2[2]*pow(t,2))+(a2[3]*pow(t,3))+(a2[4]*pow(t,4))+(a2[5]*pow(t,5))+(a2[6]*pow(t,6))+(a2[7]*pow(t,7))+(a2[8]*pow(t,8))+(a2[9]*pow(t,9));}
if(t>=1065 and t<=1664){
e=(b2[0]*pow(t,0))+(b2[1]*pow(t,1))+(b2[2]*pow(t,2))+(b2[3]*pow(t,3))+(b2[4]*pow(t,4))+(b2[5]*pow(t,5));}
if(t>=1665){
e=(c2[0]*pow(t,0))+(c2[1]*pow(t,1))+(c2[2]*pow(t,2))+(c2[3]*pow(t,3))+(c2[4]*pow(t,4));}
return e;
}
void pos(){if(newPosition>1){newPosition=1;}if(newPosition<-1){newPosition=-1;}}
void to_Timer(){newPosition = myEnc.read()/4;}
float dsRead(byte x) {
byte data[2], addr[8][8], kol = 0;
while (ds1.search(addr[kol])) { // поиск датчиков, определение адреса и кол-ва датчиков
kol++;
}
ds1.reset_search(); // Сброс поиска датчика
ds1.reset(); // Инициализация, выполняется сброс шины
ds1.select(addr[x]); // Обращение к датчику по адресу
ds1.write(0x44, 0); // Измерение температуры с переносом данных в память
ds1.reset(); // Инициализация, выполняется сброс шины
ds1.select(addr[x]); // Обращение к датчику по адресу
ds1.write(0xBE); // Обращение памяти
data[0] = ds1.read();// Чтение памяти byte low
data[1] = ds1.read();// Чтение памяти byte high
float value = ((data[1] << 8) | data[0]) / 16.0; return (float)value; // Расчет температуры и вывод
}
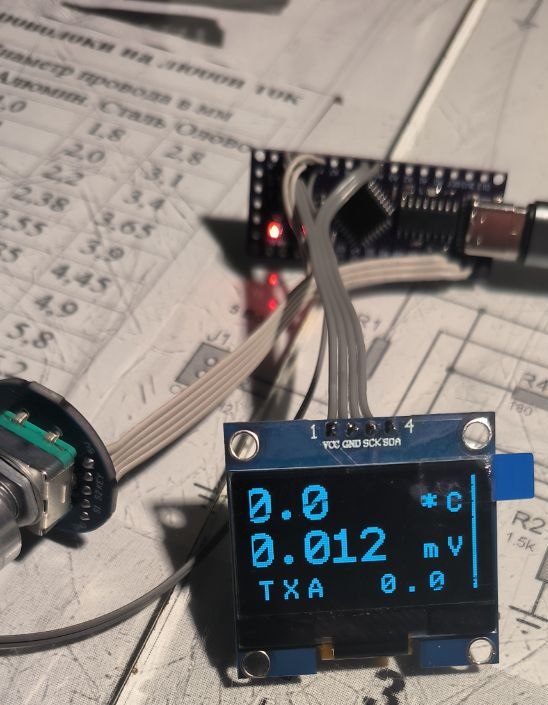
void arr(){w=1;times1=millis();kb=0;temp=ccc;i=0;ccc=0;for(i1=0;i1<5;i1++){code[i]=0;}delay(200);}Скомпилировался без проблем прошился первый раз выдал ошибку, что то с программатором СТК 500, поменял на другой и прошился без проблем. На дисплее появилось изображение со смещением в лево. На энкодер не реагирует.
так может у Вас дисплей 1,3?
Ну да. У вас на схеме так и указано.
U8GLIB_SH1106_128X64 u8g(U8G_I2C_OPT_DEV_0|U8G_I2C_OPT_FAST); // Dev 0, Fast I2C / TWI
Это не то, прошился, экран темный с права только полоска осталась.
Верну прежнею прошивку С SSD1306 c 34 поста. Экран 1.3" в 29 посту с обратной стороны фотка. Контроллер не указан.
SSD1306 0,96
SH1106 1,3
//U8GLIB_SH1106_128X64 u8g(U8G_I2C_OPT_NONE); // I2C / TWI
//U8GLIB_SH1106_128X64 u8g(U8G_I2C_OPT_DEV_0|U8G_I2C_OPT_FAST); // Dev 0, Fast I2C / TWI
//U8GLIB_SH1106_128X64 u8g(U8G_I2C_OPT_NO_ACK); // Display which does not send ACK
//U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE|U8G_I2C_OPT_DEV_0); // I2C / TWI
//U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_DEV_0|U8G_I2C_OPT_NO_ACK|U8G_I2C_OPT_FAST); // Fast I2C / TWI
//U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NO_ACK); // Display which does not send AC
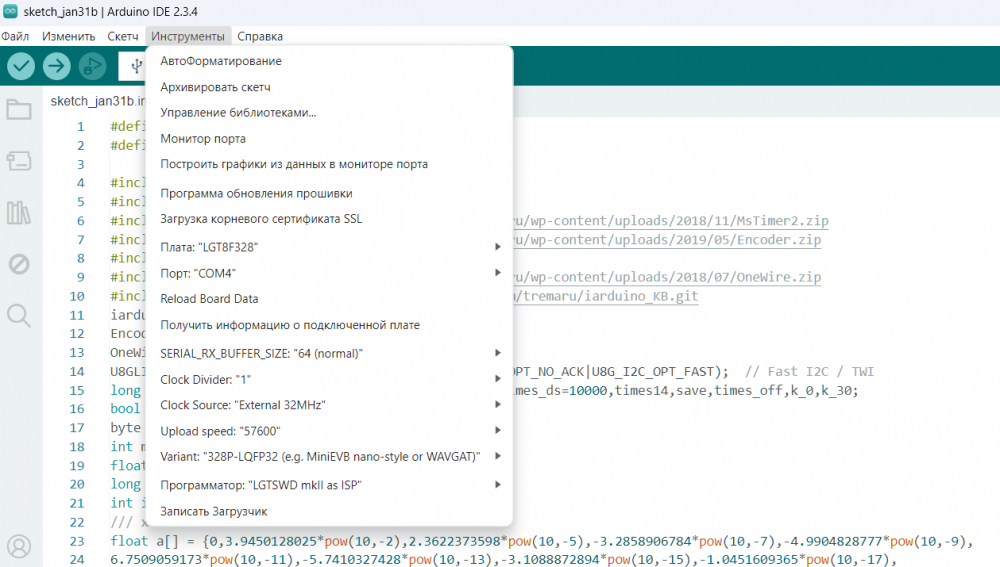
Вот мои уставки в инструментах
Я так не понял. Пробовать по строчке или все сразу.
Использовать можно только одну строчку, остальные должны быть закомментированы.
Одна из строчек должна подойти.
Подошла вот эта. U8GLIB_SH1106_128X64 u8g(U8G_I2C_OPT_DEV_0|U8G_I2C_OPT_FAST); // Dev 0, Fast I2C / TWI
и скетч с 34 поста. Прошивалась без проблем.
Изображение четкое, без смещений. Вот только на эн кодер не реагирует.
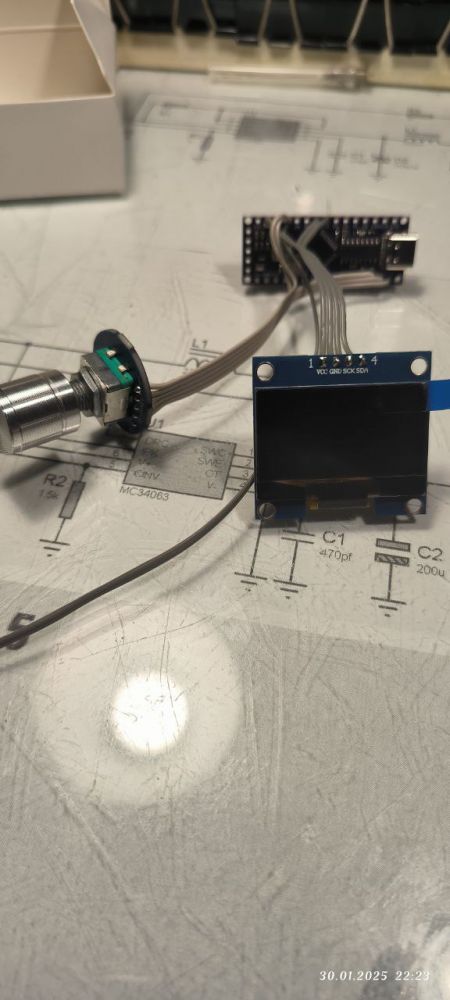
Сегодня все собрал. Пока вот так, а потом сделаю корпус. Думаю питать от USBзарядного.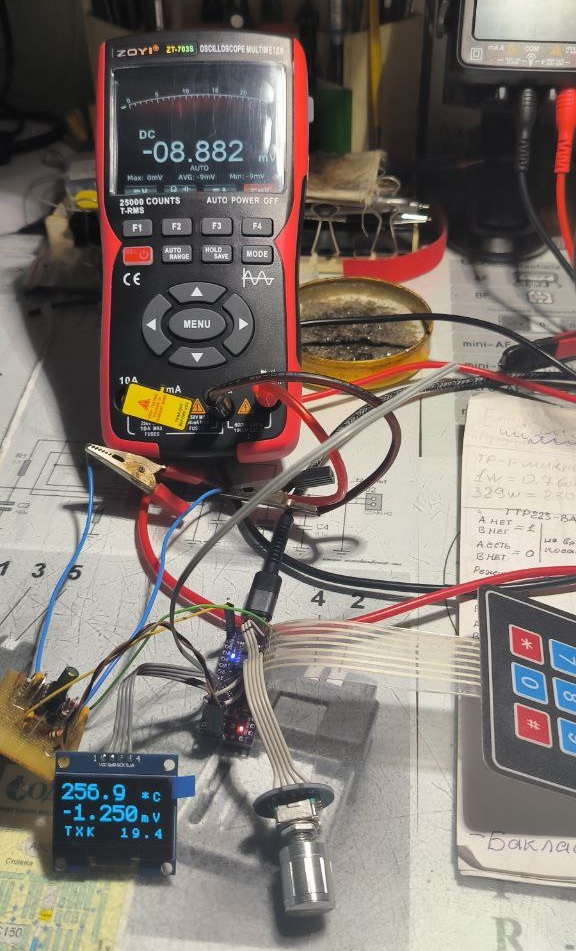
Вот только энкодер не работает, кнопка работает, крутилка нет. Клавиатура норм.
Энкодер по маркировке такой же, но платка другая.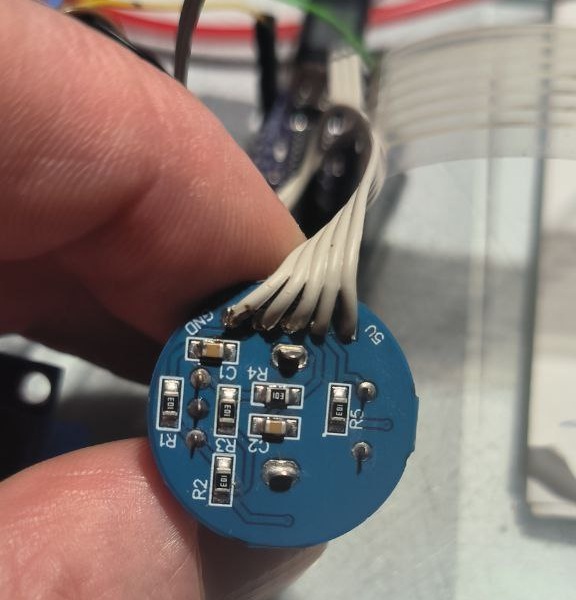
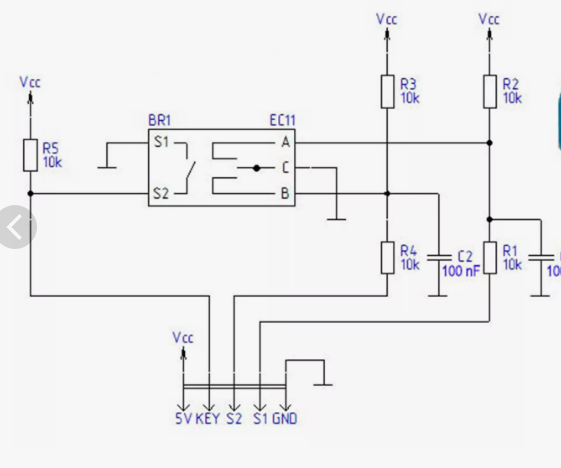
Моего энкодера немного другая схема
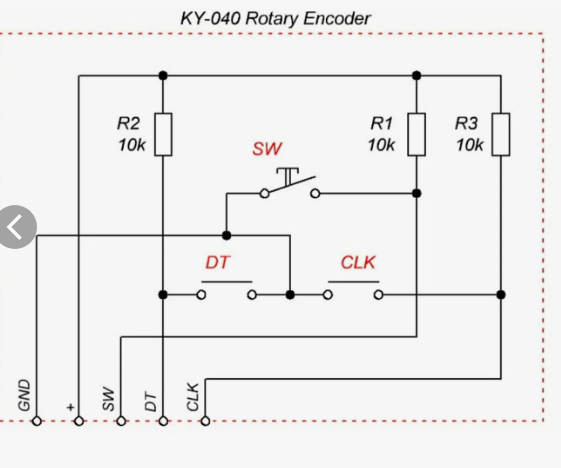
Возможно в этом причина
То есть если в место R4 и R1 поставить перемычки, то будет то что нужно. По пробую.
Спасибо все прекрасно заработало. Прошел калибровку, ровно ноль выставить не получилось, вышло " -0.1.." , по этому где то на 2 градуса ошибка. Но это не принципиально. Моя искренняя благодарность за прибор. Давно искал похожее. Буду мудрить в корпус.
forum.rcl-radio.ru → Разное → Иммитатор сигнала термопар (ТХА, ТХК, ТППs, -10...+100 mV)
Форум работает на PunBB, при поддержке Informer Technologies, Inc
|
|