Тема: bmp280
Основная статья - http://rcl-radio.ru/?p=132560
Serial port
#include <Wire.h>
#define ADDR 0b1110110
#define OSRS_T 0b101
// 000 Skipped (output set to 0x80000) –
// 001 ×1 16 bit / 0.0050 °C
// 010 ×2 17 bit / 0.0025 °C
// 011 ×4 18 bit / 0.0012 °C
// 100 ×8 19 bit / 0.0006 °C
// 101, 110, 111 ×16 20 bit / 0.0003 °C
#define OSRS_P 0b110
// 000 Skipped (output set to 0x80000) –
// 001 ×1 16 bit / 2.62 Pa
// 010 ×2 17 bit / 1.31 Pa
// 011 ×4 18 bit / 0.66 Pa
// 100 ×8 19 bit / 0.33 Pa
// 101, 110, 111 ×16 20 bit / 0.16 Pa
#define MODE 0b11
// 00 Sleep mode
// 01 and 10 Forced mode
// 11 Normal mode
#define FILTER 0b001
// 000 Filter off Full
// 001 2 0.223 × ODR
// 010 4 0.092 × ODR
// 011 8 0.042 × ODR
// 100, others 16 0.021 × ODR
#define STANDBY 0b110
// 000 0.5 ms
// 001 62.5 ms
// 010 125 ms
// 011 250 ms
// 100 500 ms
// 101 1000 ms
// 110 2000 ms
// 111 4000 ms
uint32_t t1,p1, temp_dig,press_dig;
int32_t t2,t3,p2,p3,p4,p5,p6,p7,p8,p9;
void setup() {
Serial.begin(9600);
Wire.begin();
I2C_write(0xE0, 0xB6);// reset
I2C_write(0xF5, (STANDBY<<5) | (FILTER<<2));
I2C_write(0xF4, (OSRS_T<<5)|(OSRS_P<<2)|MODE); // osrs_t settings
delay(200);
t1 = (int32_t)I2C_read(0x89) << 8 | I2C_read(0x88);
t2 = I2C_read(0x8B) << 8 | I2C_read(0x8A);
t3 = I2C_read(0x8D) << 8 | I2C_read(0x8C);
p1 = (int32_t)I2C_read(0x8F) << 8 | I2C_read(0x8E);
p2 = I2C_read(0x91) << 8 | I2C_read(0x90);
p3 = I2C_read(0x93) << 8 | I2C_read(0x92);
p4 = I2C_read(0x95) << 8 | I2C_read(0x94);
p5 = I2C_read(0x97) << 8 | I2C_read(0x96);
p6 = I2C_read(0x99) << 8 | I2C_read(0x98);
p7 = I2C_read(0x9B) << 8 | I2C_read(0x9A);
p8 = I2C_read(0x9D) << 8 | I2C_read(0x9C);
p9 = I2C_read(0x9F) << 8 | I2C_read(0x9E);
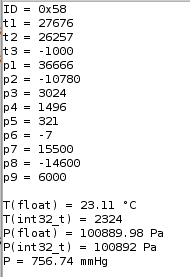
Serial.print("ID = 0x");Serial.println(I2C_read(0xD0), HEX); // ID 58
Serial.print("t1 = ");Serial.println(t1);
Serial.print("t2 = ");Serial.println(t2);
Serial.print("t3 = ");Serial.println(t3);
Serial.print("p1 = ");Serial.println(p1);
Serial.print("p2 = ");Serial.println(p2);
Serial.print("p3 = ");Serial.println(p3);
Serial.print("p4 = ");Serial.println(p4);
Serial.print("p5 = ");Serial.println(p5);
Serial.print("p6 = ");Serial.println(p6);
Serial.print("p7 = ");Serial.println(p7);
Serial.print("p8 = ");Serial.println(p8);
Serial.print("p9 = ");Serial.println(p9);
Serial.println();
}
void loop() {
temp_dig = (int32_t)I2C_read(0xFA)<<12 | (int32_t)I2C_read(0xFB)<<4 | (I2C_read(0xFC) & 0xF0)>>4;
double var1, var2, T;
var1 = (((double)temp_dig)/16384.0 - ((double)t1)/1024.0) * ((double)t2);
var2 = ((((double)temp_dig)/131072.0 - ((double)t1)/8192.0) *(((double)temp_dig)/131072.0 - ((double) t1)/8192.0)) * ((double)t3);
int32_t t_fine = (int32_t)(var1 + var2);
T = (var1 + var2) / 5120.0;
int32_t qT;
var1 = ((((temp_dig>>3) - ((uint32_t)t1<<1))) * ((uint32_t)t2)) >> 11;
var2 = (((((temp_dig>>4) - ((uint32_t)t1)) * ((temp_dig>>4) - ((uint32_t)t1))) >> 12) *((int32_t)abs(t3))) >> 14;
uint32_t qt_fine = var1 + var2;
qT = (qt_fine * 5 + 128) >> 8;
press_dig = (int32_t)I2C_read(0xF7)<<12 | (int32_t)I2C_read(0xF8)<<4 | (I2C_read(0xF9)&0xF0)>>4;
double p;
var1 = ((double)t_fine/2.0) - 64000.0;
var2 = var1 * var1 * ((double)p6) / 32768.0;
var2 = var2 + var1 * ((double)p5) * 2.0;
var2 = (var2/4.0)+(((double)p4) * 65536.0);
var1 = (((double)p3) * var1 * var1 / 524288.0 + ((double)p2) * var1) / 524288.0;
var1 = (1.0 + var1 / 32768.0)*((double)p1);
if (var1 == 0.0){return 0;}
p = 1048576.0 - (double)press_dig;
p = (p - (var2 / 4096.0)) * 6250.0 / var1;
var1 = ((double)p9) * p * p / 2147483648.0;
var2 = p * ((double)p8) / 32768.0;
p = p + (var1 + var2 + ((double)p7)) / 16.0;
int32_t zvar1, zvar2;
uint32_t zp;
zvar1 = (((int32_t)t_fine)>>1)-(int32_t)64000;
zvar2 = (((zvar1>>2) * (zvar1>>2)) >> 11 ) * ((int32_t)p6);
zvar2 = zvar2 + ((zvar1*((int32_t)p5))<<1);
zvar2 = (zvar2>>2)+(((int32_t)p4)<<16);
zvar1 = (((p3 * (((zvar1>>2) * (zvar1>>2)) >> 13 )) >> 3) + ((((int32_t)p2) * zvar1)>>1))>>18;
zvar1 =((((32768+zvar1))*((int32_t)p1))>>15);
if (zvar1 == 0){return 0; }
zp = (((uint32_t)(((int32_t)1048576)-press_dig)-(zvar2>>12)))*3125;
if (zp < 0x80000000){zp = (zp << 1) / ((uint32_t)zvar1);}
else{zp = (zp / (uint32_t)zvar1) * 2;}
zvar1 = (((int32_t)p9) * ((int32_t)(((zp>>3) * (zp>>3))>>13)))>>12;
zvar2 = (((int32_t)(zp>>2)) * ((int32_t)p8))>>13;
zp = (uint32_t)((int32_t)zp + ((zvar1 + zvar2 + p7) >> 4));
Serial.print("T(float) = ");Serial.print(T,2);Serial.println(" °C");
Serial.print("T(int32_t) = ");Serial.println(qT);
Serial.print("P(float) = ");Serial.print(p,2); Serial.println(" Pa");
Serial.print("P(int32_t) = ");Serial.print(zp); Serial.println(" Pa");
Serial.print("P = ");Serial.print(p/133.3224,2); Serial.println(" mmHg");
Serial.println();
delay(2000);
}
byte I2C_read(byte reg){
Wire.beginTransmission(ADDR);
Wire.write(reg);
Wire.endTransmission();
Wire.requestFrom(ADDR,1);
while(Wire.available()<1);
byte value = Wire.read();
return value;
}
void I2C_write(byte reg, byte data){
Wire.beginTransmission(ADDR);
Wire.write(reg);
Wire.write(data);
Wire.endTransmission();
}