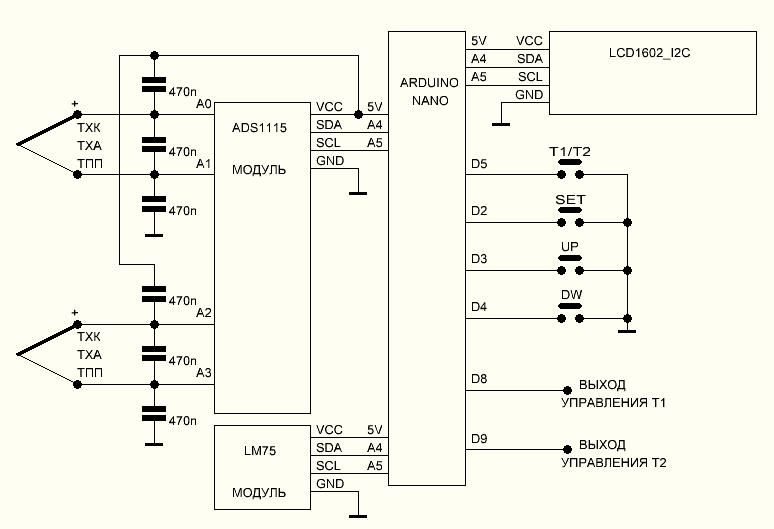
Тема: 2-х канальный ТЕРМОРЕГУЛЯТОР ТЕРМОПАРНЫЙ ТИПА ХА ХК ППs НА ADS1115
Основная статья - http://rcl-radio.ru/?p=131915

#define GIS 1.0
#include <Wire.h>
#include <Adafruit_ADS1015.h> // https://github.com/adafruit/Adafruit_ADS1X15/archive/master.zip
#include <LiquidCrystal_I2C.h>
#include <LM75.h> // https://github.com/thefekete/LM75.git
#include <EEPROM.h>
LiquidCrystal_I2C lcd(0x27,16,2);
Adafruit_ADS1115 ads;
LM75 sensor(LM75_ADDRESS | 0b111); // if A0->Vcc, A1->Vcc and A2->Vcc
int16_t results_0,results_1;
float multiplier = 0.0078125F;
float t,u,t_iz,t_reg_0,t_reg_1,t_0,t_1;
unsigned long times,times0;
bool w,w1,kanal;
int tip_0,tip_1,up_0,dw_0,up_1,dw_1;
//K
const float a[]{0,2.5173462*10,-1.1662878,-1.08336338,-8.9773540/10,-3.7342377/10,-8.6632643/100,-1.0450598/100,-5.1920577/10000};
const float a1[]{0,2.508355*10,7.860106/100,-2.503131/10,8.315270/100,-1.228034/100,9.804036/10000,-4.413030/100000,1.057734/1000000,-1.052755*pow(10,-8)};
const float a2[]{-1.318058*100,4.830222*10,-1.646031,5.464731/100,-9.6550715/10000,8.802193/1000000,-3.110810/100000000};
//L
const float b[]{1.1573067/10000,1.5884573*10,4.0458554/100,0.3170064,0.1666128,5.146958/100,9.5288883/1000,1.0301283/1000,6.0654431/100000,1.5131878/1000000};
const float b1[]{7.2069422/1000,1.5775525*10,-0.2261183,9.4286756/1000,-3.5394655/10000,1.0050886/100000,-1.9323678/10000000,2.3816891/1000000000,-1.7130654*pow(10,-11),5.4857331*pow(10,-14)};
//S
const float c[]={0,1.84949460*100,-8.00504062*10,1.02237430*100,-1.52248592*100,1.88821343*100,-1.59085941*100,8.23027880*10,-2.34181944*10,2.79786260};
const float c1[]={1.291507177*10,1.466298863*100,-1.534713402*10,3.145945973,-4.163257839/10,3.187963771/100,-1.291637500/1000,2.183475087/100000,-1.447379511/10000000,8.211272125/1000000000};
const float c2[]={-8.087801117*10,1.621573104*100,-8.536869453,4.719686976/10,-1.441693666/100,2.081618890/10000};
const float c3[]={5.333875126*10000,-1.235892298*10000,1.092657613*1000,-4.265693686*10,6.247205420/10};
void setup() {
Wire.begin();delay(200);
lcd.init();lcd.backlight();
ads.setGain(GAIN_SIXTEEN);
ads.begin();
analogReference(INTERNAL);// опорное 1,1 В
pinMode(2,INPUT_PULLUP);
pinMode(3,INPUT_PULLUP);
pinMode(4,INPUT_PULLUP);
pinMode(5,INPUT_PULLUP);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
if(EEPROM.read(100)!=0){for(int i=0;i<101;i++){EEPROM.update(i,0);}}
tip_0 = EEPROM.read(0);t_reg_0 = EEPROM.read(1)*256 + EEPROM.read(2);
tip_1 = EEPROM.read(10);t_reg_1 = EEPROM.read(11)*256 + EEPROM.read(12);
}
void loop() {
if(digitalRead(5)==LOW && kanal==0){kanal=1;w=1;times0=millis();delay(300);}
if(digitalRead(5)==LOW && kanal==1){kanal=0;w=1;times0=millis();delay(300);}
if(kanal==0){
if(digitalRead(2)==LOW){tip_0++;if(tip_0>2){tip_0=0;}w=1;times0=millis();delay(300);}
if(digitalRead(3)==LOW){if(up_0>10){t_reg_0+=10;}else{t_reg_0++;}up_0++;w=1;w1=1;times0=millis();delay(200);lcd.clear();}
if(digitalRead(4)==LOW){if(dw_0>10){t_reg_0-=10;}else{t_reg_0--;}dw_0++;w=1;w1=1;times0=millis();delay(200);lcd.clear();}
if(digitalRead(3)==HIGH){up_0=0;}if(digitalRead(4)==HIGH){dw_0=0;}
if(tip_0==0 && t_reg_0<-240){t_reg_0=-240;}if(tip_0==0 && t_reg_0>1372){t_reg_0=1372;}
if(tip_0==1 && t_reg_0<-200){t_reg_0=-200;}if(tip_0==1 && t_reg_0>800){t_reg_0=800;}
if(tip_0==2 && t_reg_0<-50){t_reg_0=-50;} if(tip_0==2 && t_reg_0>1768){t_reg_0=1768;}
}
if(kanal==1){
if(digitalRead(2)==LOW){tip_1++;if(tip_1>2){tip_1=0;}w=1;times0=millis();delay(300);}
if(digitalRead(3)==LOW){if(up_1>10){t_reg_1+=10;}else{t_reg_1++;}up_1++;w=1;w1=1;times0=millis();delay(200);lcd.clear();}
if(digitalRead(4)==LOW){if(dw_1>10){t_reg_1-=10;}else{t_reg_1--;}dw_1++;w=1;w1=1;times0=millis();delay(200);lcd.clear();}
if(digitalRead(3)==HIGH){up_1=0;}if(digitalRead(4)==HIGH){dw_1=0;}
if(tip_1==0 && t_reg_1<-240){t_reg_1=-240;}if(tip_1==0 && t_reg_1>1372){t_reg_1=1372;}
if(tip_1==1 && t_reg_1<-200){t_reg_1=-200;}if(tip_1==1 && t_reg_1>800){t_reg_1=800;}
if(tip_1==2 && t_reg_1<-50){t_reg_1=-50;} if(tip_1==2 && t_reg_1>1768){t_reg_1=1768;}
}
if(millis()-times>1000){times=millis();w=1;}
if(w==1){w=0;
results_0 = ads.readADC_Differential_0_1();
results_1 = ads.readADC_Differential_2_3();
t_iz = sensor.temp();
switch(tip_0){
case 0: txa(results_0);break;
case 1: txk(results_0);break;
case 2: tpp_s(results_0);break;
}
t_0=t;
switch(tip_1){
case 0: txa(results_1);break;
case 1: txk(results_1);break;
case 2: tpp_s(results_1);break;
}
t_1=t;
lcd.setCursor(0,0);
if(t_0==10000){lcd.print(" HIGH ");}
else if(t_0==-1000){lcd.print(" LOW ");}
else{
if(kanal==0){lcd.print("T1>");}else{lcd.print("T1 ");}lcd.print(t_0,0);lcd.print((char)223);lcd.print("C ");}
lcd.setCursor(0,1);
if(t_1==10000){lcd.print(" HIGH ");}
else if(t_1==-1000){lcd.print(" LOW ");}
else{
if(kanal==1){lcd.print("T2>");}else{lcd.print("T2 ");}lcd.print(t_1,0);lcd.print((char)223);lcd.print("C ");}
lcd.setCursor(10,0);
switch(tip_0){
case 0: lcd.print("K");break;
case 1: lcd.print("L");break;
case 2: lcd.print("S");break;
}
lcd.setCursor(10,1);
switch(tip_1){
case 0: lcd.print("K");break;
case 1: lcd.print("L");break;
case 2: lcd.print("S");break;
}
lcd.setCursor(12,0);lcd.print(t_reg_0,0);
lcd.setCursor(12,1);lcd.print(t_reg_1,0);
}
if(millis()-times0>10000 && w1==1){w1=0;
EEPROM.update(0,tip_0);EEPROM.update(1,highByte(int(t_reg_0)));EEPROM.update(2,lowByte(int(t_reg_0)));
EEPROM.update(10,tip_1);EEPROM.update(11,highByte(int(t_reg_1)));EEPROM.update(12,lowByte(int(t_reg_1)));
}
if(t_reg_0 >= t_0 + GIS){digitalWrite(8,HIGH);}
if(t_reg_0 <= t_0 - GIS){digitalWrite(8,LOW);}
if(t_reg_1 >= t_1 + GIS){digitalWrite(9,HIGH);}
if(t_reg_1 <= t_1 - GIS){digitalWrite(9,LOW);}
}
void txa(float rez){u=rez * multiplier+t_iz*0.0403;// окружающая температура 0.0403 мВ на 1 гр.Цельсия от 0 до 40 гр.Цельсия для TXA(K)
if(u<0){t=(a[0]*pow(u,0))+(a[1]*pow(u,1))+(a[2]*pow(u,2))+(a[3]*pow(u,3))+(a[4]*pow(u,4))+(a[5]*pow(u,5))+(a[6]*pow(u,6))+(a[7]*pow(u,7))+(a[8]*pow(u,8));}
if(u>=0&&u<=20.64){t=(a1[0]*pow(u,0))+(a1[1]*pow(u,1))+(a1[2]*pow(u,2))+(a1[3]*pow(u,3))+(a1[4]*pow(u,4))+(a1[5]*pow(u,5))+(a1[6]*pow(u,6))+(a1[7]*pow(u,7))+(a1[8]*pow(u,8))+(a1[9]*pow(u,9));}
if(u>20.64){t=(a2[0]*pow(u,0))+(a2[1]*pow(u,1))+(a2[2]*pow(u,2))+(a2[3]*pow(u,3))+(a2[4]*pow(u,4))+(a2[5]*pow(u,5))+(a2[6]*pow(u,6));}
if(rez * multiplier<-6.35){t=-1000;} if(rez * multiplier>54.9){t=10000;}
}
void txk(float rez){u=rez * multiplier+t_iz*0.06555;// окружающая температура 0.06555 мВ на 1 гр.Цельсия от 0 до 40 гр.Цельсия для TXK(L)
if(u<0){t=(b[0]*pow(u,0))+(b[1]*pow(u,1))+(b[2]*pow(u,2))+(b[3]*pow(u,3))+(b[4]*pow(u,4))+(b[5]*pow(u,5))+(b[6]*pow(u,6))+(b[7]*pow(u,7))+(b[8]*pow(u,8))+(b[9]*pow(u,9));}
if(u>=0){t=(b1[0]*pow(u,0))+(b1[1]*pow(u,1))+(b1[2]*pow(u,2))+(b1[3]*pow(u,3))+(b1[4]*pow(u,4))+(b1[5]*pow(u,5))+(b1[6]*pow(u,6))+(b1[7]*pow(u,7))+(b1[8]*pow(u,8))+(b1[9]*pow(u,9));}
if(rez * multiplier<-9.49){t=-1000;} if(rez * multiplier>66.47){t=10000;}
}
void tpp_s(float rez){u=rez * multiplier+t_iz*0.005875;// окружающая температура 0.005875 мВ на 1 гр.Цельсия от 0 до 40 гр.Цельсия для TPPs(S)
if(u<1.874){t=(c[0]*pow(u,0))+(c[1]*pow(u,1))+(c[2]*pow(u,2))+(c[3]*pow(u,3))+(c[4]*pow(u,4))+(c[5]*pow(u,5))+(c[6]*pow(u,6))+(c[7]*pow(u,7))+(c[8]*pow(u,8))+(c[9]*pow(u,9));}
if(u>=1.874&&u<10.332){t=(c1[0]*pow(u,0))+(c1[1]*pow(u,1))+(c1[2]*pow(u,2))+(c1[3]*pow(u,3))+(c1[4]*pow(u,4))+(c1[5]*pow(u,5))+(c1[6]*pow(u,6))+(c1[7]*pow(u,7))+(c1[8]*pow(u,8))+(c1[9]*pow(u,9));}
if(u>=10.332&&u<17.536){t=(c2[0]*pow(u,0))+(c2[1]*pow(u,1))+(c2[2]*pow(u,2))+(c2[3]*pow(u,3))+(c2[4]*pow(u,4))+(c2[5]*pow(u,5));}
if(u>=17.536&&u<=18.694){t=(c3[0]*pow(u,0))+(c3[1]*pow(u,1))+(c3[2]*pow(u,2))+(c3[3]*pow(u,3))+(c3[4]*pow(u,4));}
if(rez * multiplier<-0.236){t=-1000;} if(rez * multiplier>18.70){t=10000;}
}