Тема: Источник питания с токовой стабилизацией и микроконтроллерным управл.
Разработка
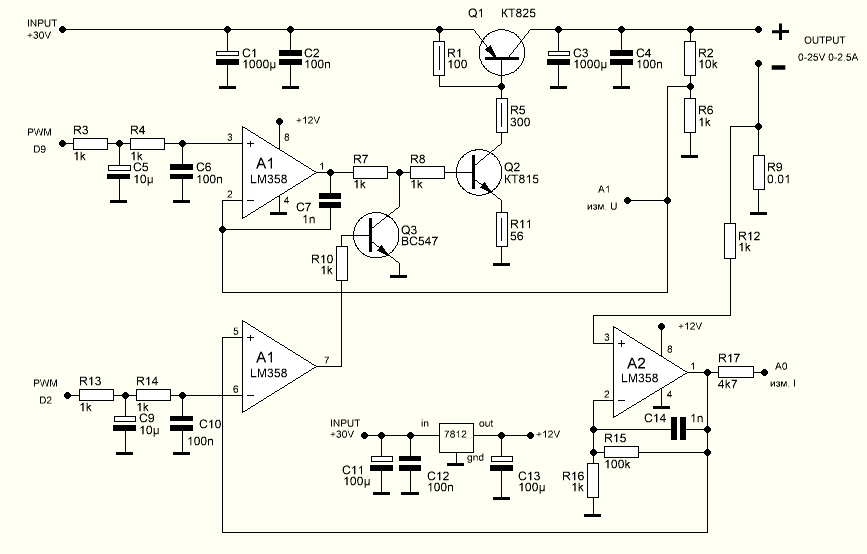
Схема регулятора
Вы не вошли. Пожалуйста, войдите или зарегистрируйтесь.
forum.rcl-radio.ru → Разное → Источник питания с токовой стабилизацией и микроконтроллерным управл.
Страницы 1
Чтобы отправить ответ, вы должны войти или зарегистрироваться
Разработка
Схема регулятора
#define KALL_U 214
#define KALL_I 1325
#define KALL_I_IZ 0.820
#define KALL_U_IZ 1.090
#include <Wire.h>
#include <U8glib.h> // https://github.com/olikraus/u8glib/
#include <EEPROM.h>
#include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip
#include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip
Encoder myEnc(6, 5);// DT, CLK
U8GLIB_SH1106_128X64 u8g(U8G_I2C_OPT_DEV_0|U8G_I2C_OPT_FAST);
float u=0,i=0,u_iz,i_iz;
long times,oldPosition = -999,newPosition,times0,i_sum,u_sum;
bool iu,w,w1,power;
int n,m;
float i_dig,u_dig;
void setup() {
delay(200);Wire.begin();Serial.begin(9600);
pinMode(7,INPUT); // SW ENCODER
pinMode(11,INPUT_PULLUP);// ON OFF OUTPUT
MsTimer2::set(1, to_Timer);MsTimer2::start();
if(EEPROM.read(100)!=0){for(int i=0;i<101;i++){EEPROM.update(i,0);}}// очистка памяти при первом включении
u = float(EEPROM.read(0));i=float(EEPROM.read(1));
analogReadResolution(12);// АЦП 12 БИТ
analogReference(INTERNAL4V096);
pinMode(A0,INPUT);
pinMode(A1,INPUT);
cli();
// TIMER_1 D9 OUTPUT
DDRB = 1 << PB1;
TCCR1A = 0;TCCR1B = 0;
TCCR1A = 1 << COM1A1 | 1 << WGM11;
TCCR1B = 1 << WGM13 | 1 << WGM12 | 1 << CS10;
ICR1 = 10000;
OCR1A = 0;
// TIMER_3 D2 OUTPUT
TCCR3A=0;TCCR3B=0;
DDRF |= (1<<PF2);
HDR = 1 << HDR3;
TCCR3A = 1 << COM3B1 | 1 << WGM31;
TCCR3B = 1 << WGM33 | 1 << WGM32 | 1 << CS30;
ICR3 = 5000;
OCR3B = 0;
sei();
u8g.firstPage();
do {
u8g.setFont(u8g_font_profont12r);
u8g.drawStr(30,10,"POWER SUPPLY");
u8g.drawStr(30,25,"0-25V 0-2.5A");
u8g.drawStr(30,55,"rcl-radio.ru");
} while( u8g.nextPage() );
delay(2000);
OCR1A = KALL_U*u/10;
OCR3B = KALL_I*i/100.0;
}
void loop() {
if(digitalRead(7)==LOW &&iu==0){iu=1;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(7)==LOW &&iu==1){iu=0;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(11)==LOW &&power==0){power=1;OCR1A=0;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(11)==LOW &&power==1){power=0;OCR1A = KALL_U*u/10;times=millis();w=1;w1=1;delay(200);}
i_dig = analogRead(A0);
i_sum = i_sum+i_dig;
n++;if(n>9){n=0;i_iz=i_sum/10;i_sum=0;}
u_dig = analogRead(A1);
u_sum = u_sum+u_dig;
m++;if(m>9){m=0;u_iz=u_sum/10;u_sum=0;w=1;}
if(iu==0){
if(newPosition != oldPosition){oldPosition = newPosition;if(newPosition>1){newPosition=1;}if(newPosition<-1){newPosition=-1;}
u=u+newPosition;myEnc.write(0);newPosition=0;
if(u<0){u=0;}if(u>250){u=250;}times=millis();if(power==0){OCR1A = KALL_U*u/10;}w=1;w1=1;}
}
if(iu==1){
if(newPosition != oldPosition){oldPosition = newPosition;if(newPosition>1){newPosition=1;}if(newPosition<-1){newPosition=-1;}
i=i+newPosition;myEnc.write(0);newPosition=0;
if(i<0){i=0;}if(i>250){i=250;}times=millis();if(power==0){OCR3B = KALL_I*i/100.0;}w=1;w1=1;}
}
u8g.firstPage();
do {
u8g.drawLine(0, 26, 128, 26);u8g.drawLine(0, 53, 128, 53);
u8g.setFont(u8g_font_profont29r);
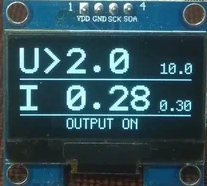
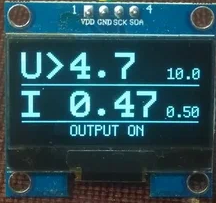
if(iu==0){u8g.drawStr(0,22,"U>");}else{u8g.drawStr(0,22,"U ");}u8g.setPrintPos(35, 22);u8g.print(u_iz*KALL_U_IZ/100.0,1);
if(iu==1){u8g.drawStr(0,50,"I>");}else{u8g.drawStr(0,50,"I ");}u8g.setPrintPos(35, 50);u8g.print(i_iz*KALL_I_IZ/1000.0,2);
u8g.setFont(u8g_font_profont12r);
u8g.setPrintPos(105, 22);u8g.print(u/10.0,1);
u8g.setPrintPos(105, 50);u8g.print(i/100.0,2);
if(power==0){u8g.drawStr(35,64,"OUTPUT ON ");}else{u8g.drawStr(35,64,"OUTPUT OFF");}
u8g.setPrintPos(60, 64);
} while( u8g.nextPage() );
if(millis()-times>5000 && w1==1){EEPROM.update(0,u);EEPROM.update(1,i);w1=0;w=1;iu=0;myEnc.write(0);}
}
void to_Timer(){newPosition = myEnc.read()/4;} 

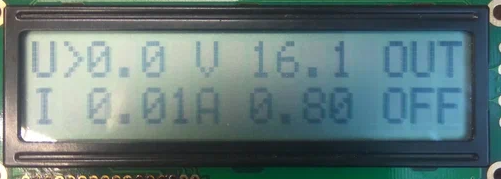
lcd1602


#define KALL_U 214
#define KALL_I 1325
#define KALL_I_IZ 0.820
#define KALL_U_IZ 1.090
#include <Wire.h>
#include <LiquidCrystal_I2C.h> // http://forum.rcl-radio.ru/misc.php?action=pan_download&item=45&download=1
#include <EEPROM.h>
#include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip
#include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip
Encoder myEnc(6, 5);// DT, CLK
LiquidCrystal_I2C lcd(0x27,16,2); // Устанавливаем дисплей
float u=0,i=0,u_iz,i_iz;
long times,oldPosition = -999,newPosition,times0,i_sum,u_sum;
bool iu,w,w1,power;
int n,m;
float i_dig,u_dig;
void setup() {
delay(200);Wire.begin();Serial.begin(9600);
lcd.init();lcd.backlight();
pinMode(7,INPUT); // SW ENCODER
pinMode(11,INPUT_PULLUP);// ON OFF OUTPUT
MsTimer2::set(1, to_Timer);MsTimer2::start();
if(EEPROM.read(100)!=0){for(int i=0;i<101;i++){EEPROM.update(i,0);}}// очистка памяти при первом включении
u = float(EEPROM.read(0));i=float(EEPROM.read(1));
analogReadResolution(12);// АЦП 12 БИТ
analogReference(INTERNAL4V096);
pinMode(A0,INPUT);
pinMode(A1,INPUT);
cli();
// TIMER_1 D9 OUTPUT
DDRB = 1 << PB1;
TCCR1A = 0;TCCR1B = 0;
TCCR1A = 1 << COM1A1 | 1 << WGM11;
TCCR1B = 1 << WGM13 | 1 << WGM12 | 1 << CS10;
ICR1 = 10000;
OCR1A = 0;
// TIMER_3 D2 OUTPUT
TCCR3A=0;TCCR3B=0;
DDRF |= (1<<PF2);
HDR = 1 << HDR3;
TCCR3A = 1 << COM3B1 | 1 << WGM31;
TCCR3B = 1 << WGM33 | 1 << WGM32 | 1 << CS30;
ICR3 = 5000;
OCR3B = 0;
sei();
lcd.setCursor(2,0);lcd.print("POWER SUPPLY");
lcd.setCursor(2,1);lcd.print("0-25V 0-2.5A");
delay(2000);
OCR1A = KALL_U*u/10;
OCR3B = KALL_I*i/100.0;
lcd.clear();
}
void loop() {
if(digitalRead(7)==LOW &&iu==0){iu=1;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(7)==LOW &&iu==1){iu=0;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(11)==LOW &&power==0){power=1;OCR1A=0;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(11)==LOW &&power==1){power=0;OCR1A = KALL_U*u/10;times=millis();w=1;w1=1;delay(200);}
i_dig = analogRead(A0);
i_sum = i_sum+i_dig;
n++;if(n>99){n=0;i_iz=i_sum/100;i_sum=0;}
u_dig = analogRead(A1);
u_sum = u_sum+u_dig;
m++;if(m>99){m=0;u_iz=u_sum/100;u_sum=0;w=1;}
if(iu==0){
if(newPosition != oldPosition){oldPosition = newPosition;if(newPosition>1){newPosition=1;}if(newPosition<-1){newPosition=-1;}
u=u+newPosition;myEnc.write(0);newPosition=0;
if(u<0){u=0;}if(u>250){u=250;}times=millis();if(power==0){OCR1A = KALL_U*u/10;}w=1;w1=1;}
}
if(iu==1){
if(newPosition != oldPosition){oldPosition = newPosition;if(newPosition>1){newPosition=1;}if(newPosition<-1){newPosition=-1;}
i=i+newPosition;myEnc.write(0);newPosition=0;
if(i<0){i=0;}if(i>250){i=250;}times=millis();if(power==0){OCR3B = KALL_I*i/100.0;}w=1;w1=1;}
}
if(w==1){w=0;
lcd.setCursor(0,0);if(iu==0){lcd.print("U>");}else{lcd.print("U ");}lcd.print(u_iz*KALL_U_IZ/100.0,1);
if(u_iz*KALL_U_IZ/100.0<10){lcd.setCursor(5,0);lcd.print(" ");}lcd.setCursor(6,0);lcd.print("V ");
lcd.setCursor(0,1);if(iu==1){lcd.print("I>");}else{lcd.print("I ");}lcd.print(i_iz*KALL_I_IZ/1000.0,2);lcd.setCursor(6,1);lcd.print("A ");
lcd.setCursor(8,0);lcd.print(u/10.0,1);
lcd.setCursor(8,1);lcd.print(i/100.0,2);
lcd.setCursor(13,0);lcd.print("OUT");
lcd.setCursor(13,1);if(power==0){lcd.print("ON ");}else{lcd.print("OFF");}
}
if(millis()-times>5000 && w1==1){EEPROM.update(0,u);EEPROM.update(1,i);w1=0;w=1;iu=0;myEnc.write(0);}
}
void to_Timer(){newPosition = myEnc.read()/4;} XL4016 в качестве источника питания регулятора тока и напряжения для повышения КПД
#define KALL_U 214
#define KALL_I 1325
#define KALL_I_IZ 0.820
#define KALL_U_IZ 1.090
#include <Wire.h>
#include <U8glib.h> // https://github.com/olikraus/u8glib/
#include <EEPROM.h>
#include <MsTimer2.h> // http://rcl-radio.ru/wp-content/uploads/2018/11/MsTimer2.zip
#include <Encoder.h> // http://rcl-radio.ru/wp-content/uploads/2019/05/Encoder.zip
Encoder myEnc(6, 5);// DT, CLK
U8GLIB_SH1106_128X64 u8g(U8G_I2C_OPT_DEV_0|U8G_I2C_OPT_FAST);
float u=0,i=0,u_iz,i_iz;
long times,oldPosition = -999,newPosition,times0,i_sum,u_sum;
bool iu,w,w1,power;
int n,m;
float i_dig,u_dig;
void setup() {
delay(200);Wire.begin();Serial.begin(9600);
pinMode(7,INPUT); // SW ENCODER
pinMode(11,INPUT_PULLUP);// ON OFF OUTPUT
MsTimer2::set(1, to_Timer);MsTimer2::start();
if(EEPROM.read(100)!=0){for(int i=0;i<101;i++){EEPROM.update(i,0);}}// очистка памяти при первом включении
u = float(EEPROM.read(0));i=float(EEPROM.read(1));
analogReadResolution(12);// АЦП 12 БИТ
analogReference(INTERNAL4V096);
pinMode(A0,INPUT);
pinMode(A1,INPUT);
pinMode(DAC0, ANALOG);// d4 output
cli();
// TIMER_1 D9 OUTPUT
DDRB = 1 << PB1;
TCCR1A = 0;TCCR1B = 0;
TCCR1A = 1 << COM1A1 | 1 << WGM11;
TCCR1B = 1 << WGM13 | 1 << WGM12 | 1 << CS10;
ICR1 = 10000;
OCR1A = 0;
// TIMER_3 D2 OUTPUT
TCCR3A=0;TCCR3B=0;
DDRF |= (1<<PF2);
HDR = 1 << HDR3;
TCCR3A = 1 << COM3B1 | 1 << WGM31;
TCCR3B = 1 << WGM33 | 1 << WGM32 | 1 << CS30;
ICR3 = 5000;
OCR3B = 0;
sei();
u8g.firstPage();
do {
u8g.setFont(u8g_font_profont12r);
u8g.drawStr(30,10,"POWER SUPPLY");
u8g.drawStr(30,25,"0-25V 0-2.5A");
u8g.drawStr(30,55,"rcl-radio.ru");
} while( u8g.nextPage() );
delay(2000);
OCR1A = KALL_U*u/10;
OCR3B = KALL_I*i/100.0;
}
void loop() {
if(u<100){analogWrite(DAC0, 80);}else{analogWrite(DAC0, 150.0/25.0*(u/10.0+3));}
if(digitalRead(7)==LOW &&iu==0){iu=1;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(7)==LOW &&iu==1){iu=0;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(11)==LOW &&power==0){power=1;OCR1A=0;times=millis();w=1;w1=1;delay(200);}
if(digitalRead(11)==LOW &&power==1){power=0;OCR1A = KALL_U*u/10;times=millis();w=1;w1=1;delay(200);}
i_dig = analogRead(A0);
i_sum = i_sum+i_dig;
n++;if(n>9){n=0;i_iz=i_sum/10;i_sum=0;}
u_dig = analogRead(A1);
u_sum = u_sum+u_dig;
m++;if(m>9){m=0;u_iz=u_sum/10;u_sum=0;w=1;}
if(iu==0){
if(newPosition != oldPosition){oldPosition = newPosition;if(newPosition>1){newPosition=1;}if(newPosition<-1){newPosition=-1;}
u=u+newPosition;myEnc.write(0);newPosition=0;
if(u<0){u=0;}if(u>250){u=250;}times=millis();if(power==0){OCR1A = KALL_U*u/10;}w=1;w1=1;}
}
if(iu==1){
if(newPosition != oldPosition){oldPosition = newPosition;if(newPosition>1){newPosition=1;}if(newPosition<-1){newPosition=-1;}
i=i+newPosition;myEnc.write(0);newPosition=0;
if(i<0){i=0;}if(i>250){i=250;}times=millis();if(power==0){OCR3B = KALL_I*i/100.0;}w=1;w1=1;}
}
u8g.firstPage();
do {
u8g.drawLine(0, 26, 128, 26);u8g.drawLine(0, 53, 128, 53);
u8g.setFont(u8g_font_profont29r);
if(iu==0){u8g.drawStr(0,22,"U>");}else{u8g.drawStr(0,22,"U ");}u8g.setPrintPos(35, 22);u8g.print(u_iz*KALL_U_IZ/100.0,1);
if(iu==1){u8g.drawStr(0,50,"I>");}else{u8g.drawStr(0,50,"I ");}u8g.setPrintPos(35, 50);u8g.print(i_iz*KALL_I_IZ/1000.0,2);
u8g.setFont(u8g_font_profont12r);
u8g.setPrintPos(105, 22);u8g.print(u/10.0,1);
u8g.setPrintPos(105, 50);u8g.print(i/100.0,2);
if(power==0){u8g.drawStr(35,64,"OUTPUT ON ");}else{u8g.drawStr(35,64,"OUTPUT OFF");}
u8g.setPrintPos(60, 64);
} while( u8g.nextPage() );
if(millis()-times>5000 && w1==1){EEPROM.update(0,u);EEPROM.update(1,i);w1=0;w=1;iu=0;myEnc.write(0);}
}
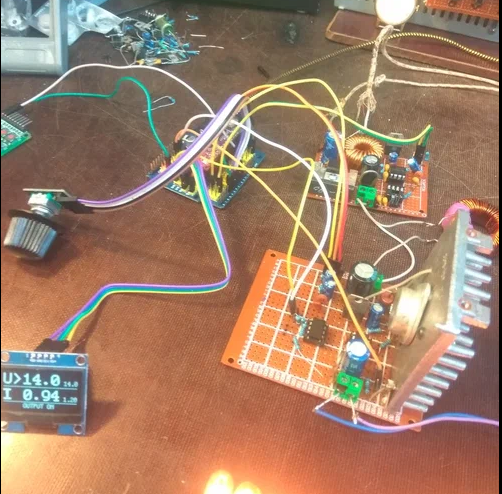
void to_Timer(){newPosition = myEnc.read()/4;} Фото проекта

Добрый день.
Все это интересно! Но опять вопрос, на ардуинке будет работать? Меня интересует схема на XL4016, в качестве блока питания, есть большое желание ее повторить.
В прошлой статье Вы мне ответили:
--------------------
-В принципе должно, но показания тока будут неверные. Используется lgt, так как иметься АЦП 12 бит и внутренний ИОН 4.096В.
--------------------
Сдесь таже история?
Да, тоже надо lgt8f328
А как адаптировать под ардуино? Это сложно?
Если возможно, то очень прошу, если нет, то буду lgt заказывать в китае.
Доброго времени суток! Здорово, что взялись за гибридный БП, назовем эту связку так. Основной минус схемы оконечного каскада и схемы БП, что мы мучали год назад - использование ШИМ сигнала для регулирования.
А как адаптировать под ардуино? Это сложно?
Если возможно, то очень прошу, если нет, то буду lgt заказывать в китае.
Лучше заказать, нет ни какой гарантии что с ардуино будет работать корректно.
Добрый день. Как изменить максимальное напряжение до 18в. и ток до 0,80 А.
Спасибо. Андрей.
if(u<0){u=0;}if(u>250){u=250;}
>>
if(u<0){u=0;}if(u>180){u=180;}
if(i<0){i=0;}if(i>250){i=250;}
>>
if(i<0){i=0;}if(i>80){i=80;}
Благодарю. Андрей.
Страницы 1
Чтобы отправить ответ, вы должны войти или зарегистрироваться
forum.rcl-radio.ru → Разное → Источник питания с токовой стабилизацией и микроконтроллерным управл.
Форум работает на PunBB, при поддержке Informer Technologies, Inc
|
|