Установка времени часов кнопки НН ММ
Установка времени будильника - нажать один раз кнопку SET, далее кнопки НН ММ
Al On - будильник активен, Al Off - будильник не активен
Нажать кнопку SET чтобы выключить сигнал будильника при его срабатывании
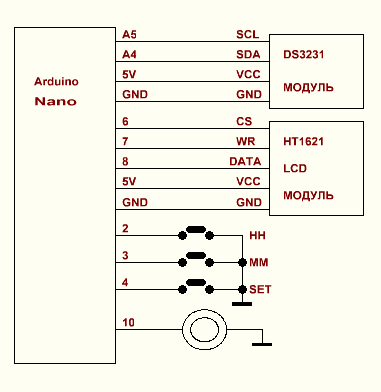




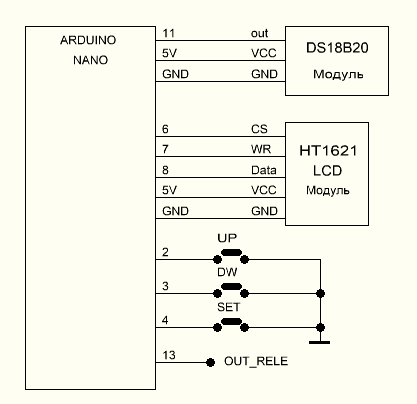
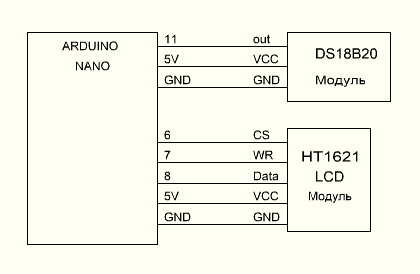
#define LCD_CS 6
#define LCD_WR 7
#define LCD_DATA 8
#define HH 2
#define MM 3
#define SET 4
#define TONE 10
#define HT1621_BIAS 0x52 // 1/3duty 4com
#define HT1621_SYS_DIS 0x00 // Turn off the oscillator system oscillator and LCD bias generator
#define HT1621_SYS_EN 0x02 // Turn on the system oscillator
#define HT1621_LCD_OFF 0x04 // Turn off LCD bias
#define HT1621_LCD_ON 0x06 // Turn on the LCE bias
#define HT1621_XTAL 0x28 // external clock
#define HT1621_RC256 0x30 // internal clock
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
#include <EEPROM.h>
DS3231 clock;
RTCDateTime DateTime;
unsigned long times,times1;
int hour,minut,secon,temp,set;
int hh_alarm,mm_alarm;
bool w,alarm,on_alarm,ton;
void setup() {
clock.begin();
//clock.setDateTime(__DATE__, __TIME__); // Устанавливаем время на часах, основываясь на времени компиляции скетча
pinMode(LCD_CS, OUTPUT);
pinMode(LCD_WR, OUTPUT);
pinMode(LCD_DATA, OUTPUT);
pinMode(TONE, OUTPUT);
pinMode(HH,INPUT_PULLUP);
pinMode(MM,INPUT_PULLUP);
pinMode(SET,INPUT_PULLUP);
digitalWrite(LCD_CS,HIGH);
digitalWrite(LCD_WR,HIGH);
data_100(HT1621_SYS_EN); // Turn on the system oscillator
data_100(HT1621_BIAS); // BIAS 13 4 public ports
data_100(HT1621_RC256); // Use RC_256K system clock source, on-chip RC oscillator
data_100(HT1621_LCD_ON);
clear_lcd();
hh_alarm = EEPROM.read(10);
mm_alarm = EEPROM.read(11);
alarm = EEPROM.read(12);
}
void loop(){
DateTime = clock.getDateTime();
hour = DateTime.hour;
minut = DateTime.minute;
secon = DateTime.second;
if(ton==0){
if(digitalRead(SET)==LOW){set++;if(set>2){set=0;}}
if(digitalRead(HH)==LOW&&set==0){hour++;if(hour>23){hour=0;} clock.setDateTime(2024, 2, 22, hour, minut, 0);}
if(digitalRead(MM)==LOW&&set==0){minut++;if(minut>59){minut=0;} clock.setDateTime(2024, 2, 22, hour, minut, 0);}
if(digitalRead(HH)==LOW&&set==1){hh_alarm++;w=1;times1 = millis();if(hh_alarm>23){hh_alarm=0;}}
if(digitalRead(MM)==LOW&&set==1){mm_alarm++;w=1;times1 = millis();if(mm_alarm>59){mm_alarm=0;}}
if(digitalRead(HH)==LOW&&set==2){alarm=1;w=1;times1 = millis();}
if(digitalRead(MM)==LOW&&set==2){alarm=0;w=1;times1 = millis();}
}
if(ton==1&&digitalRead(SET)==LOW){on_alarm=0;ton=0;delay(200);}
if(set==0){
if(secon<55){
if(alarm==0){print_lcd(5, 10,false);}else{print_lcd(5, 11,false);}
print_lcd(4, hour/10%10,false);
print_lcd(3, hour%10,false);
if(millis()-times<500){print_lcd(2, minut/10%10,true);}else{print_lcd(2, minut/10%10,false);}
print_lcd(1, minut%10,false);
if(alarm==0){print_lcd(0, 10,false);}else{print_lcd(0, 11,false);}
if(millis()-times>=1000){times=millis();}
}
if(secon>=55){
temp=clock.readTemperature();
print_lcd(5, 10,false);
print_lcd(4, temp/10%10,false);
print_lcd(3, temp%10,false);
print_lcd(2, 12,true);
print_lcd(1, 13,false);
print_lcd(0, 10,false);
}
}
if(set==1){
print_lcd(5, 10,false);
print_lcd(4, hh_alarm/10%10,false);
print_lcd(3, hh_alarm%10,false);
print_lcd(2, mm_alarm/10%10,true);
print_lcd(1, mm_alarm%10,false);
print_lcd(0, 10,false);
}
if(set==2 && alarm==1){
print_lcd(5, 14,false);
print_lcd(4, 15,false);
print_lcd(3, 10,false);
print_lcd(2, 0,false);
print_lcd(1, 16,false);
print_lcd(0, 10,false);
}
if(set==2 && alarm==0){
print_lcd(5, 14,false);
print_lcd(4, 15,false);
print_lcd(3, 10,false);
print_lcd(2, 0,false);
print_lcd(1, 17,false);
print_lcd(0, 17,false);
}
delay(200);
if(millis()-times1>5000&&w==1){w=0;EEPROM.update(10, hh_alarm);EEPROM.update(11, mm_alarm);EEPROM.update(12, alarm);}
if(alarm==1&&on_alarm==1&&(hour*100+minut==hh_alarm*100+mm_alarm)){ton=1;tone(TONE,1200,500);delay(100);}
if(hour*100+minut!=hh_alarm*100+mm_alarm){on_alarm=1;ton=0;}
}
void print_lcd(byte raz, byte num, bool dp){
switch(raz){
case 0: raz=0;break;
case 1: raz=2;break;
case 2: raz=4;break;
case 3: raz=6;break;
case 4: raz=8;break;
case 5: raz=10;break;
}
switch(num){
case 0: data_101(raz,0b1110+dp);data_101(raz+1,0b1011);break; // 0
case 1: data_101(raz,0b0110+dp);data_101(raz+1,0b0000);break; // 1
case 2: data_101(raz,0b1100+dp);data_101(raz+1,0b0111);break; // 2
case 3: data_101(raz,0b1110+dp);data_101(raz+1,0b0101);break; // 3
case 4: data_101(raz,0b0110+dp);data_101(raz+1,0b1100);break; // 4
case 5: data_101(raz,0b1010+dp);data_101(raz+1,0b1101);break; // 5
case 6: data_101(raz,0b1010+dp);data_101(raz+1,0b1111);break; // 6
case 7: data_101(raz,0b1110+dp);data_101(raz+1,0b0000);break; // 7
case 8: data_101(raz,0b1110+dp);data_101(raz+1,0b1111);break; // 8
case 9: data_101(raz,0b1110+dp);data_101(raz+1,0b1101);break; // 9
case 10: data_101(raz,0);data_101(raz+1,0);break; // пусто
case 11: data_101(raz,0b0000);data_101(raz+1,0b0100);break; // -
case 12: data_101(raz,0b1100);data_101(raz+1,0b1100);break; // градус
case 13: data_101(raz,0b1000);data_101(raz+1,0b1011);break; // C
case 14: data_101(raz,0b1110);data_101(raz+1,0b1110);break; // A
case 15: data_101(raz,0b0000);data_101(raz+1,0b1011);break; // l
case 16: data_101(raz,0b0010);data_101(raz+1,0b0110);break; // n
case 17: data_101(raz,0b1000);data_101(raz+1,0b1110);break; // F
}
}
void clear_lcd(){for(int a=0;a<=32;a++){data_101(a,0);}}
void data_100(int data){
digitalWrite(LCD_CS,LOW);
for(int i = 2; i >=0; i--){
digitalWrite(LCD_WR,LOW);delayMicroseconds(10);
digitalWrite(LCD_DATA, (0b100 >> i) & 1);
digitalWrite(LCD_WR,HIGH);delayMicroseconds(10);
}
for(int i = 8; i >=0; i--){
digitalWrite(LCD_WR,LOW);delayMicroseconds(10);
digitalWrite(LCD_DATA, (data >> i) & 1);
digitalWrite(LCD_WR,HIGH);delayMicroseconds(10);
}
delayMicroseconds(10);digitalWrite(LCD_CS,HIGH);
delayMicroseconds(10);digitalWrite(LCD_WR,LOW);
delayMicroseconds(10);
}
void data_101(int addr, int data){
digitalWrite(LCD_CS,LOW);
for(int i = 2; i >=0; i--){
digitalWrite(LCD_WR,LOW);delayMicroseconds(10);
digitalWrite(LCD_DATA, (0b101 >> i) & 1);
digitalWrite(LCD_WR,HIGH);delayMicroseconds(10);
}
for(int i = 5; i >=0; i--){
digitalWrite(LCD_WR,LOW);delayMicroseconds(10);
digitalWrite(LCD_DATA, (addr >> i) & 1);
digitalWrite(LCD_WR,HIGH);delayMicroseconds(10);
}
for(int i = 0; i <=3; i++){
digitalWrite(LCD_WR,LOW);delayMicroseconds(10);
digitalWrite(LCD_DATA, (data >> i) & 1);
digitalWrite(LCD_WR,HIGH);delayMicroseconds(10);
}
delayMicroseconds(10);digitalWrite(LCD_CS,HIGH);
delayMicroseconds(10);digitalWrite(LCD_WR,LOW);
}