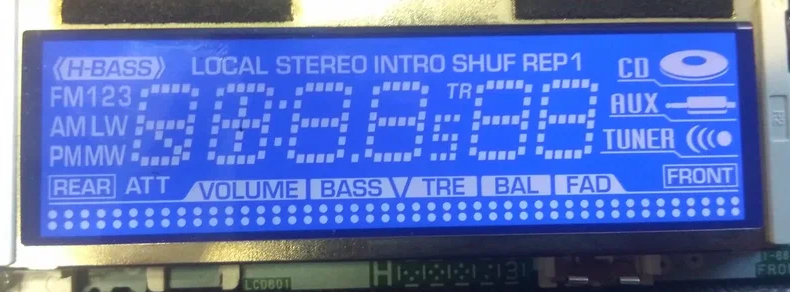
На 3 фото распиновка шлейфа соединения панели и главной платы
 ]]> ]]>
]]> ]]>
#include <Wire.h>
#include <INA3221.h>
#define SERIAL_SPEED 9600 // serial baud rate
#define PRINT_DEC_POINTS 3 // decimal points to print
// Set I2C address to 0x41 (A0 pin -> VCC)
INA3221 ina3221(INA3221_ADDR40_GND);
void setup() {
Serial.begin(SERIAL_SPEED);
while (!Serial) {
delay(1);
}
ina3221.begin();
ina3221.reset();
// Set shunt resistors to 10 mOhm for all channels
ina3221.setShuntRes(100, 100, 100);
// Set series filter resistors to 10 Ohm for all channels.
// Series filter resistors introduce error to the current measurement.
// The error can be estimated and depends on the resitor values and the bus
// voltage.
ina3221.setFilterRes(100, 100, 100);
}
void loop() {
float current[3];
float current_compensated[3];
float voltage[3];
current[0] = ina3221.getCurrent(INA3221_CH1);
current_compensated[0] = ina3221.getCurrentCompensated(INA3221_CH1);
voltage[0] = ina3221.getVoltage(INA3221_CH1);
current[1] = ina3221.getCurrent(INA3221_CH2);
current_compensated[1] = ina3221.getCurrentCompensated(INA3221_CH2);
voltage[1] = ina3221.getVoltage(INA3221_CH2);
current[2] = ina3221.getCurrent(INA3221_CH3);
current_compensated[2] = ina3221.getCurrentCompensated(INA3221_CH3);
voltage[2] = ina3221.getVoltage(INA3221_CH3);
Serial.print("Channel 1: \n Current: ");
Serial.print(current[0], PRINT_DEC_POINTS);
Serial.print("A\n Compensated current: ");
Serial.print(current_compensated[0], PRINT_DEC_POINTS);
Serial.print("\n Voltage: ");
Serial.print(voltage[0], PRINT_DEC_POINTS);
Serial.println("V");
Serial.print("Channel 2: \n Current: ");
Serial.print(current[1], PRINT_DEC_POINTS);
Serial.print("A\n Compensated current: ");
Serial.print(current_compensated[1], PRINT_DEC_POINTS);
Serial.print("\n Voltage: ");
Serial.print(voltage[1], PRINT_DEC_POINTS);
Serial.println("V");
Serial.print("Channel 3: \n Current: ");
Serial.print(current[2], PRINT_DEC_POINTS);
Serial.print("A\n Compensated current: ");
Serial.print(current_compensated[2], PRINT_DEC_POINTS);
Serial.print("\n Voltage: ");
Serial.print(voltage[2], PRINT_DEC_POINTS);
Serial.println("V\n");
delay(1000);
}Serial port
#include <Wire.h>
#define ADDR 0b1110110
#define OSRS_T 0b101
// 000 Skipped (output set to 0x80000) –
// 001 ×1 16 bit / 0.0050 °C
// 010 ×2 17 bit / 0.0025 °C
// 011 ×4 18 bit / 0.0012 °C
// 100 ×8 19 bit / 0.0006 °C
// 101, 110, 111 ×16 20 bit / 0.0003 °C
#define OSRS_P 0b110
// 000 Skipped (output set to 0x80000) –
// 001 ×1 16 bit / 2.62 Pa
// 010 ×2 17 bit / 1.31 Pa
// 011 ×4 18 bit / 0.66 Pa
// 100 ×8 19 bit / 0.33 Pa
// 101, 110, 111 ×16 20 bit / 0.16 Pa
#define MODE 0b11
// 00 Sleep mode
// 01 and 10 Forced mode
// 11 Normal mode
#define FILTER 0b001
// 000 Filter off Full
// 001 2 0.223 × ODR
// 010 4 0.092 × ODR
// 011 8 0.042 × ODR
// 100, others 16 0.021 × ODR
#define STANDBY 0b110
// 000 0.5 ms
// 001 62.5 ms
// 010 125 ms
// 011 250 ms
// 100 500 ms
// 101 1000 ms
// 110 2000 ms
// 111 4000 ms
uint32_t t1,p1, temp_dig,press_dig;
int32_t t2,t3,p2,p3,p4,p5,p6,p7,p8,p9;
void setup() {
Serial.begin(9600);
Wire.begin();
I2C_write(0xE0, 0xB6);// reset
I2C_write(0xF5, (STANDBY<<5) | (FILTER<<2));
I2C_write(0xF4, (OSRS_T<<5)|(OSRS_P<<2)|MODE); // osrs_t settings
delay(200);
t1 = (int32_t)I2C_read(0x89) << 8 | I2C_read(0x88);
t2 = I2C_read(0x8B) << 8 | I2C_read(0x8A);
t3 = I2C_read(0x8D) << 8 | I2C_read(0x8C);
p1 = (int32_t)I2C_read(0x8F) << 8 | I2C_read(0x8E);
p2 = I2C_read(0x91) << 8 | I2C_read(0x90);
p3 = I2C_read(0x93) << 8 | I2C_read(0x92);
p4 = I2C_read(0x95) << 8 | I2C_read(0x94);
p5 = I2C_read(0x97) << 8 | I2C_read(0x96);
p6 = I2C_read(0x99) << 8 | I2C_read(0x98);
p7 = I2C_read(0x9B) << 8 | I2C_read(0x9A);
p8 = I2C_read(0x9D) << 8 | I2C_read(0x9C);
p9 = I2C_read(0x9F) << 8 | I2C_read(0x9E);
Serial.print("ID = 0x");Serial.println(I2C_read(0xD0), HEX); // ID 58
Serial.print("t1 = ");Serial.println(t1);
Serial.print("t2 = ");Serial.println(t2);
Serial.print("t3 = ");Serial.println(t3);
Serial.print("p1 = ");Serial.println(p1);
Serial.print("p2 = ");Serial.println(p2);
Serial.print("p3 = ");Serial.println(p3);
Serial.print("p4 = ");Serial.println(p4);
Serial.print("p5 = ");Serial.println(p5);
Serial.print("p6 = ");Serial.println(p6);
Serial.print("p7 = ");Serial.println(p7);
Serial.print("p8 = ");Serial.println(p8);
Serial.print("p9 = ");Serial.println(p9);
Serial.println();
}
void loop() {
temp_dig = (int32_t)I2C_read(0xFA)<<12 | (int32_t)I2C_read(0xFB)<<4 | (I2C_read(0xFC) & 0xF0)>>4;
double var1, var2, T;
var1 = (((double)temp_dig)/16384.0 - ((double)t1)/1024.0) * ((double)t2);
var2 = ((((double)temp_dig)/131072.0 - ((double)t1)/8192.0) *(((double)temp_dig)/131072.0 - ((double) t1)/8192.0)) * ((double)t3);
int32_t t_fine = (int32_t)(var1 + var2);
T = (var1 + var2) / 5120.0;
int32_t qT;
var1 = ((((temp_dig>>3) - ((uint32_t)t1<<1))) * ((uint32_t)t2)) >> 11;
var2 = (((((temp_dig>>4) - ((uint32_t)t1)) * ((temp_dig>>4) - ((uint32_t)t1))) >> 12) *((int32_t)abs(t3))) >> 14;
uint32_t qt_fine = var1 + var2;
qT = (qt_fine * 5 + 128) >> 8;
press_dig = (int32_t)I2C_read(0xF7)<<12 | (int32_t)I2C_read(0xF8)<<4 | (I2C_read(0xF9)&0xF0)>>4;
double p;
var1 = ((double)t_fine/2.0) - 64000.0;
var2 = var1 * var1 * ((double)p6) / 32768.0;
var2 = var2 + var1 * ((double)p5) * 2.0;
var2 = (var2/4.0)+(((double)p4) * 65536.0);
var1 = (((double)p3) * var1 * var1 / 524288.0 + ((double)p2) * var1) / 524288.0;
var1 = (1.0 + var1 / 32768.0)*((double)p1);
if (var1 == 0.0){return 0;}
p = 1048576.0 - (double)press_dig;
p = (p - (var2 / 4096.0)) * 6250.0 / var1;
var1 = ((double)p9) * p * p / 2147483648.0;
var2 = p * ((double)p8) / 32768.0;
p = p + (var1 + var2 + ((double)p7)) / 16.0;
int32_t zvar1, zvar2;
uint32_t zp;
zvar1 = (((int32_t)t_fine)>>1)-(int32_t)64000;
zvar2 = (((zvar1>>2) * (zvar1>>2)) >> 11 ) * ((int32_t)p6);
zvar2 = zvar2 + ((zvar1*((int32_t)p5))<<1);
zvar2 = (zvar2>>2)+(((int32_t)p4)<<16);
zvar1 = (((p3 * (((zvar1>>2) * (zvar1>>2)) >> 13 )) >> 3) + ((((int32_t)p2) * zvar1)>>1))>>18;
zvar1 =((((32768+zvar1))*((int32_t)p1))>>15);
if (zvar1 == 0){return 0; }
zp = (((uint32_t)(((int32_t)1048576)-press_dig)-(zvar2>>12)))*3125;
if (zp < 0x80000000){zp = (zp << 1) / ((uint32_t)zvar1);}
else{zp = (zp / (uint32_t)zvar1) * 2;}
zvar1 = (((int32_t)p9) * ((int32_t)(((zp>>3) * (zp>>3))>>13)))>>12;
zvar2 = (((int32_t)(zp>>2)) * ((int32_t)p8))>>13;
zp = (uint32_t)((int32_t)zp + ((zvar1 + zvar2 + p7) >> 4));
Serial.print("T(float) = ");Serial.print(T,2);Serial.println(" °C");
Serial.print("T(int32_t) = ");Serial.println(qT);
Serial.print("P(float) = ");Serial.print(p,2); Serial.println(" Pa");
Serial.print("P(int32_t) = ");Serial.print(zp); Serial.println(" Pa");
Serial.print("P = ");Serial.print(p/133.3224,2); Serial.println(" mmHg");
Serial.println();
delay(2000);
}
byte I2C_read(byte reg){
Wire.beginTransmission(ADDR);
Wire.write(reg);
Wire.endTransmission();
Wire.requestFrom(ADDR,1);
while(Wire.available()<1);
byte value = Wire.read();
return value;
}
void I2C_write(byte reg, byte data){
Wire.beginTransmission(ADDR);
Wire.write(reg);
Wire.write(data);
Wire.endTransmission();
} int servoPin = 9; // сигнальный провод от серво на порт 9
int val;
void setup()
{
pinMode(servoPin, OUTPUT);
Serial.begin(9600);
Serial.println("Servo is ready");
}
void loop(){
val = 0;
for (int i = 0; i <= 50; i++){servoPulse(servoPin, val);}
delay(1000);
val = 90;
for (int i = 0; i <= 50; i++){servoPulse(servoPin, val);}
delay(1000);
val = 180;
for (int i = 0; i <= 50; i++){servoPulse(servoPin, val);}
delay(1000);
val = 90;
for (int i = 0; i <= 50; i++){servoPulse(servoPin, val);}
delay(1000);
}
// define a servo pulse function
void servoPulse(int pin, int angle){
int pulseWidth = map(angle, 0, 180 , 544, 2480);
Serial.println(pulseWidth);
digitalWrite(pin, HIGH); // set the level of servo pin as high
delayMicroseconds(pulseWidth); // delay microsecond of pulse width
digitalWrite(pin, LOW); // set the level of servo pin as low
delayMicroseconds(20000 - pulseWidth);
}/* Sweep
by BARRAGAN <http://barraganstudio.com>
This example code is in the public domain.
modified 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Sweep
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
myservo.write(0);
delay(1000);
myservo.write(90);
delay(1000);
myservo.write(180);
delay(1000);
myservo.write(90);
delay(1000);
}
#define S0 2
#define S1 3
#define S2 4
#define S3 5
void setup(){
Serial.begin(9600);
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
}
void loop(){
for (int i = 0; i < 16; i++){
read4067(i);
float izm = 5.00/1023*analogRead(A0);
Serial.println(String(i)+" = "+String(izm)+" V");
}
delay(5000);
Serial.println();
}
int read4067(byte ch){
digitalWrite(S0, (ch & 0b0001));
digitalWrite(S1, (ch & 0b0010)>>1);
digitalWrite(S2, (ch & 0b0100)>>2);
digitalWrite(S3, (ch & 0b1000)>>3);
}
// LGT8F328
#define AN1 2
#define AN2 3
#define AN3 4
#define AN4 5
#define AN5 6
#define ID1 11
#define ID2 10
#define ID4 7
#define ID8 8
#define SET A0 // BUTTON SET
#define UP A2 // BUTTON +++
#define DW A1 // BUTTON ---
#define BR 300 // 400-3000 яркость
#include <Wire.h>
#include <DS3231.h> //http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
DS3231 clock;
RTCDateTime DateTime;
int an, segm,i;
byte a[5];
int dp,h,m,set,tic;
unsigned long times0;
bool x;
void setup() {
Wire.begin();clock.begin();
Serial.begin(9600);
Serial.println("ok");
pinMode(9,OUTPUT);// PWM TIMER_1
pinMode(AN1,OUTPUT);pinMode(AN2,OUTPUT);pinMode(AN3,OUTPUT);pinMode(AN4,OUTPUT);pinMode(AN5,OUTPUT);
pinMode(ID1,OUTPUT);pinMode(ID2,OUTPUT);pinMode(ID4,OUTPUT);pinMode(ID8,OUTPUT);
pinMode(SET,INPUT_PULLUP);pinMode(UP,INPUT_PULLUP);pinMode(DW,INPUT_PULLUP);
// clock.setDateTime(__DATE__, __TIME__); // Устанавливаем время на часах, основываясь на времени компиляции скетча
cli();
//TIMER_1 PWM +170V
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
TCCR1A |= (1<<COM1A1);
TCCR1B |= (1<<WGM12);
TCCR1A |= (1<<WGM11);
TCCR1B |= (1 << CS10);
ICR1 = 511;
OCR1A = 350;
//TIMER_2
TCCR2A = 0;
TCCR2B = 0;
TCNT2 = 0;
OCR2A = 120;
TCCR2A |= (1 << WGM21);
TCCR2B |= (1 << CS22) | (1 << CS21) | (1 << CS20);
TIMSK2 |= (1 << OCIE2A);
sei();
}
void loop() {
DateTime=clock.getDateTime();// опрос времени
h = DateTime.hour;
m = DateTime.minute;
if(digitalRead(SET)==LOW){set++;if(set>2){set=0;}delay(200);}
if(set==1){
if(digitalRead(UP)==LOW){x=1;tic=0;h++;if(h>23){h=23;}delay(200);}
if(digitalRead(DW)==LOW){x=1;tic=0;h--;if(h<0){h=0;}delay(200);}
if(tic==0){a[0]=h/10%10;}else{a[0]=10;}
if(tic==0){a[1]=h%10;}else{a[1]=10;}
a[2]=7;
a[3]=m/10%10;
a[4]=m%10;
}
if(set==2){
if(digitalRead(UP)==LOW){x=1;tic=0;m++;if(m>59){m=59;}delay(200);}
if(digitalRead(DW)==LOW){x=1;tic=0;m--;if(m<0){m=0;}delay(200);}
a[0]=h/10%10;
a[1]=h%10;
a[2]=7;
if(tic==0){a[3]=m/10%10;}else{a[3]=10;}
if(tic==0){a[4]=m%10;}else{a[4]=10;}
}
if(x==1){x=0;clock.setDateTime(2024, 1, 1, h, m, 0);}
if(set==0){
if(millis()-times0<500){dp=8;}
if(millis()-times0>=500){dp=10;}
if(millis()-times0>1000){times0=millis();}
a[0]=h/10;
a[1]=h%10;
a[2]=dp;
a[3]=m/10%10;
a[4]=m%10;
}
tic++;
if(tic>1){tic=0;}
delay(100);
}
void segment(){
switch(segm){
case 0: digitalWrite(ID1,LOW);digitalWrite(ID2,LOW);digitalWrite(ID4,LOW);digitalWrite(ID8,LOW);break; // DEC 0 = 0b0000
case 1: digitalWrite(ID1,LOW);digitalWrite(ID2,LOW);digitalWrite(ID4,LOW);digitalWrite(ID8,HIGH);break; // DEC 1 = 0b0001
case 2: digitalWrite(ID1,LOW);digitalWrite(ID2,LOW);digitalWrite(ID4,HIGH);digitalWrite(ID8,LOW);break; // DEC 2 = 0b0010
case 3: digitalWrite(ID1,LOW);digitalWrite(ID2,LOW);digitalWrite(ID4,HIGH);digitalWrite(ID8,HIGH);break; // DEC 3 = 0b0011
case 4: digitalWrite(ID1,LOW);digitalWrite(ID2,HIGH);digitalWrite(ID4,LOW);digitalWrite(ID8,LOW);break; // DEC 4 = 0b0100
case 5: digitalWrite(ID1,LOW);digitalWrite(ID2,HIGH);digitalWrite(ID4,LOW);digitalWrite(ID8,HIGH);break; // DEC 5 = 0b0101
case 6: digitalWrite(ID1,LOW);digitalWrite(ID2,HIGH);digitalWrite(ID4,HIGH);digitalWrite(ID8,LOW);break; // DEC 6 = 0b0110
case 7: digitalWrite(ID1,LOW);digitalWrite(ID2,HIGH);digitalWrite(ID4,HIGH);digitalWrite(ID8,HIGH);break; // DEC 7 = 0b0111
case 8: digitalWrite(ID1,HIGH);digitalWrite(ID2,LOW);digitalWrite(ID4,LOW);digitalWrite(ID8,LOW);break; // DEC 8 = 0b1000
case 9: digitalWrite(ID1,HIGH);digitalWrite(ID2,LOW);digitalWrite(ID4,LOW);digitalWrite(ID8,HIGH);break; // DEC 9 = 0b0110
case 10: digitalWrite(ID1,HIGH);digitalWrite(ID2,HIGH);digitalWrite(ID4,HIGH);digitalWrite(ID8,HIGH);break;
}}
void anod(){
switch(an){
case 0: digitalWrite(AN1,HIGH);digitalWrite(AN2,LOW);digitalWrite(AN3,LOW);digitalWrite(AN4,LOW);digitalWrite(AN5,LOW);break;
case 1: digitalWrite(AN1,LOW);digitalWrite(AN2,HIGH);digitalWrite(AN3,LOW);digitalWrite(AN4,LOW);digitalWrite(AN5,LOW);break;
case 2: digitalWrite(AN1,LOW);digitalWrite(AN2,LOW);digitalWrite(AN3,HIGH);digitalWrite(AN4,LOW);digitalWrite(AN5,LOW);break;
case 3: digitalWrite(AN1,LOW);digitalWrite(AN2,LOW);digitalWrite(AN3,LOW);digitalWrite(AN4,HIGH);digitalWrite(AN5,LOW);break;
case 4: digitalWrite(AN1,LOW);digitalWrite(AN2,LOW);digitalWrite(AN3,LOW);digitalWrite(AN4,LOW);digitalWrite(AN5,HIGH);break;
}}
ISR(TIMER2_COMPA_vect) {
switch(i){
case 0: segm=a[0]; an=0;cl();delayMicroseconds(BR); anod(); segment();break;
case 1: segm=a[1]; an=1;cl();delayMicroseconds(BR); anod(); segment();break;
case 2: segm=a[2]; an=2;cl();delayMicroseconds(BR); anod(); segment();break;
case 3: segm=a[3]; an=3;cl();delayMicroseconds(BR); anod(); segment();break;
case 4: segm=a[4]; an=4;cl();delayMicroseconds(BR); anod(); segment();break;
}
i++;if(i>4){i=0;}}
void cl(){digitalWrite(AN1,LOW);digitalWrite(AN2,LOW);digitalWrite(AN3,LOW);digitalWrite(AN4,LOW);digitalWrite(AN5,LOW);
digitalWrite(ID1,HIGH);digitalWrite(ID2,HIGH);digitalWrite(ID4,HIGH);digitalWrite(ID8,HIGH);
}
Индикатор : DA56-11EWA - 
/*
Общий анод
--------------------------------------------------|
Цифра|dp | G | F | E | D | C | B | A | Десятичный |
-----|---|---|---|---|---|---|---|---|------------|
0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 192 |
1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 249 |
2 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 164 |
3 | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 176 |
4 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 153 |
5 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 146 |
6 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 130 |
7 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 248 |
8 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 128 |
9 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 144 |
dp | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 127 |
-----*---*---*---*---*---*---*---*---*------------*
*/
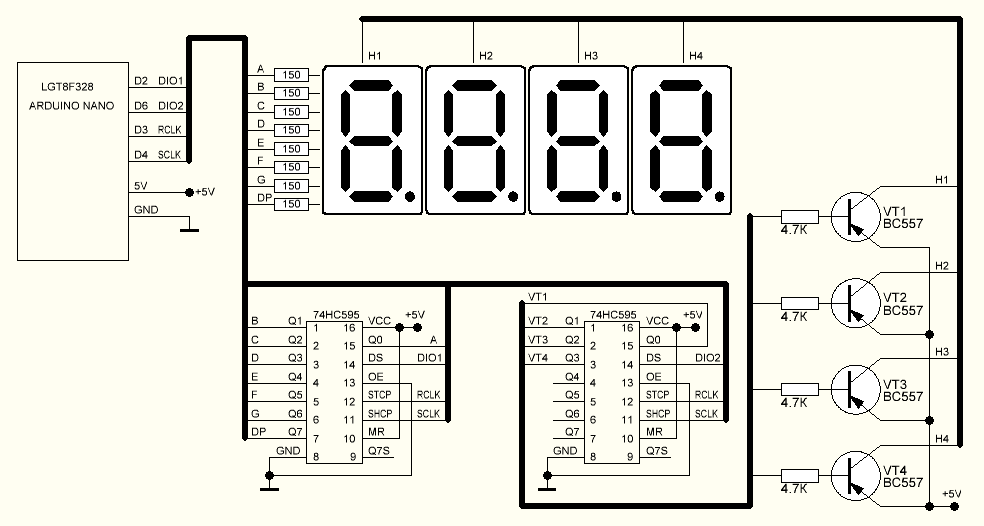
#define RCLK 3
#define SCLK 4
#define DIO1 2
#define DIO2 6
byte razr[4] = {0b1110,0b1101,0b1011,0b0111};// 0123
byte digit[13] = {192,249,164,176,153,146,130,248,128,144,127,255,191}; // 0 1 2 3 4 5 6 7 8 9 dp пусто -
int k;
byte a[4];
int i0,dp;
void setup(){
Serial.begin(9600);
noInterrupts();
TCCR2B = 1 << CS22 | 1 << CS21;
TIMSK2 = 1 << OCIE2A;
OCR2A = 150;
interrupts();
pinMode(RCLK, OUTPUT); // RCLK
pinMode(SCLK, OUTPUT); // SCLK
pinMode(DIO1, OUTPUT); // DIO1
pinMode(DIO2, OUTPUT); // DIO2
}
void loop(){
k++;
delay(100);
}
ISR(TIMER2_COMPA_vect) {
a[0]=k/1000%10;
a[1]=k/100%10;
a[2]=k/10%10;
a[3]=k%10;
if(i0>3){i0=0;}
if(i0==1){dp=0x80;}else{dp=0;}// i0=1 - запятая в 1 индикаторе (0123 === 01.23)
digitalWrite(RCLK, LOW);
for(int i1 = 7; i1 >=0; i1--){
digitalWrite(SCLK,LOW);
digitalWrite(DIO2, (razr[i0] >> i1) & 1);
digitalWrite(DIO1, ((digit[a[i0]]-dp) >> i1) & 1);
digitalWrite(SCLK,HIGH);
}
digitalWrite(RCLK, HIGH);
i0++;
} 
#define DELAY 200
#define CE 3
#define CL 4
#define DI 2
unsigned long t=0b10000000000000000000000000000000;// 32 bit
unsigned long t1=0b1000000000000000000000000000; // 28 bit
void setup() {
Serial.begin(9600);
pinMode(CE, OUTPUT);
pinMode(CL, OUTPUT);
pinMode(DI, OUTPUT);
digitalWrite(CE,LOW);
digitalWrite(CL,LOW);
delay(200);
// 1 32
//byte_1 00000000000000000000000000000000
// 33 64
//byte_2 00000000000000000000000000000000
// 65 96
//byte_3 00000000000000000000000000000000
// 97 128
//byte_4 00000000000000000000000000000000
// 129 156
//byte_5 0000000000000000000000000000
}
void loop() {
write_byte(0xFFFFFFFF,0xFFFFFFFF,0xFFFFFFFF,0xFFFFFFFF,0B1111111111111111111111111111,0b0000);
delay(5000);
for(int j=0;j<=31;j++){
write_byte(t>>j,0,0,0,0,0b0000);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+1);
delay(DELAY);
}
for(int j=0;j<=31;j++){
write_byte(0,t>>j,0,0,0,0b0000);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+33);
delay(DELAY);
}
for(int j=0;j<=31;j++){
write_byte(0,0,t>>j,0,0,0b0000);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+65);
delay(DELAY);
}
for(int j=0;j<=31;j++){
write_byte(0,0,0,t>>j,0,0b0000);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+97);
delay(DELAY);
}
for(int j=0;j<=27;j++){
write_byte(0,0,0,0,t>>j,0b0000);
Serial.print(t1>>j,BIN); Serial.print(" bit "); Serial.println(j+129);
delay(DELAY);
}
}
void write_byte( unsigned long b0, unsigned long b1, unsigned long b2, unsigned long b3, unsigned long b4, byte contr){
/// addr 8 bit
digitalWrite(CE,LOW);delayMicroseconds(10);
for(int i = 0; i <= 7; i++){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (0x41 >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(CE,HIGH);delayMicroseconds(10);
// data 156 bit
// 1-24 seg
for(int i = 31;i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (b0 >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
for(int i = 31;i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (b1 >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
for(int i = 31;i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (b2 >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
for(int i = 31;i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (b3 >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
for(int i = 27;i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (b4 >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
// control data 4 bit
for(int i = 3; i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (contr >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
digitalWrite(CE,LOW);
digitalWrite(CL,LOW);
delay(1);
} http://rcl-radio.ru/wp-content/uploads/ … ne-smd.pdf
#define DELAY 1000
#define CE 3
#define CL 4
#define DI 2
long t=0b100000000000000000000;
void setup(){
Serial.begin(9600);
pinMode(CE, OUTPUT);
pinMode(CL, OUTPUT);
pinMode(DI, OUTPUT);
digitalWrite(CE,LOW);
digitalWrite(CL,LOW);
delay(200);
write_byte(0,0,0,0,0,0);
}
/*
b1 1 21
0b111111111111111111111
b2 22 42
0b111111111111111111111
b3 43 63
0b111111111111111111111
b4 64 84
0b111111111111111111111
b5 85 105
0b111111111111111111111
b6 106 126
0b111111111111111111111
*/
void loop(){
write_byte(0b111111111111111111111,0b111111111111111111111, 0b111111111111111111111,0b111111111111111111111, 0b111111111111111111111,0b111111111111111111111);
delay(5000);
for(int j=0;j<=20;j++){
write_byte(t>>j,0,0,0,0,0);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+1);
delay(DELAY);
}
for(int j=0;j<=20;j++){
write_byte(0,t>>j,0,0,0,0);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+22);
delay(DELAY);
}
for(int j=0;j<=20;j++){
write_byte(0,0,t>>j,0,0,0);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+43);
delay(DELAY);
}
for(int j=0;j<=20;j++){
write_byte(0,0,0,t>>j,0,0);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+64);
delay(DELAY);
}
for(int j=0;j<=20;j++){
write_byte(0,0,0,0,t>>j,0);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+85);
delay(DELAY);
}
for(int j=0;j<=20;j++){
write_byte(0,0,0,0,0,t>>j);
Serial.print(t>>j,BIN); Serial.print(" bit "); Serial.println(j+106);
delay(DELAY);
}
}
void write_byte(long b1, long b2, long b3, long b4, long b5, long b6){
write_addr();
write_21(b1);
write_21(b2);
write_conf(0b00000000000100);
write_addr();
write_21(b3);
write_21(b4);
write_conf(0b00000000000001);
write_addr();
write_21(b5);
write_21(b6);
write_conf(0b00000000000010);
}
void write_addr(){
digitalWrite(CE,LOW);delayMicroseconds(10);
for(int i = 7; i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (0x42 >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
digitalWrite(CL,LOW);
digitalWrite(CE,HIGH);
delayMicroseconds(10);
}
void write_21(long bb){
for(int i = 20;i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (bb >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
}
void write_conf(long data_conf){
for(int i = 13;i >= 0; i--){
digitalWrite(CL,LOW);delayMicroseconds(10);
digitalWrite(DI, (data_conf >> i) & 1);
digitalWrite(CL,HIGH);delayMicroseconds(10);
}
digitalWrite(CE,LOW);delayMicroseconds(10);
}
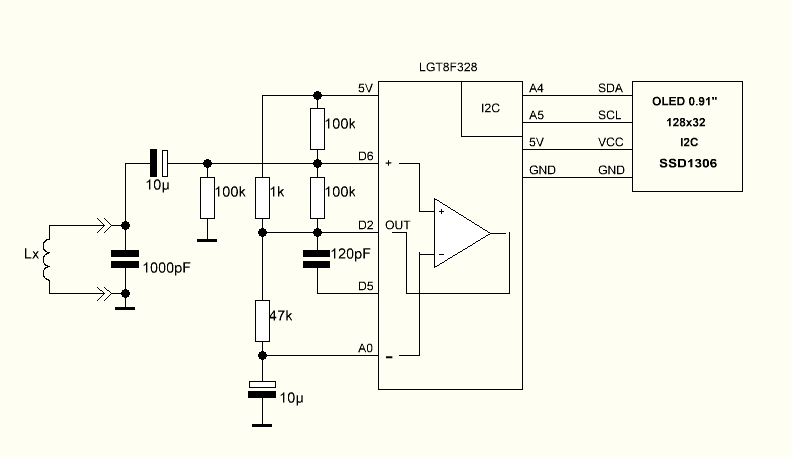


#include <Wire.h>
#include <U8glib.h> // https://github.com/olikraus/u8glib/
//U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE|U8G_I2C_OPT_DEV_0);
U8GLIB_SSD1306_128X32 u8g(U8G_I2C_OPT_NONE); // I2C / TWI
#define CAL 31249;
#define CAP 1000.0 // pF
extern uint8_t SmallFont[],BigNumbers[];
unsigned long f_out,tic;
void setup() {
Serial.begin(9600);
Wire.begin();
PORTD |= (1 << PD5); // подтягивающий резистор на PD5 (вход T1)
// TIMER_1 INPUT T1
TCCR1A = 0;TCCR1B = 0;TCNT1=0;
TCCR1B = (1 << CS12) | (1 << CS11) | (1 << CS10);
TIMSK1 = (1 << TOIE1);
TCKCSR = (1 << F2XEN) | (1 << TC2XS1);
// TIMER_3 1 SEC
// (32000000/((31249+1)x1024))=1 Hz
TCCR3A = 0;
TCCR3B = 0;
TCNT3=0;
TCCR3B = (1 << CS32) |(1 << CS30) | (1 << WGM32);
TIMSK3 = (1 << OCIE3A);
OCR3A = CAL;
// TIMER_2 OUTPUT 8 MHz
TCCR2A = 0;TCCR2B = 0;TCNT2=0;
TCCR2A = 1 << COM2A0 |1 << WGM21;
TCCR2B = 1 << CS20;
OCR2A = 0;
C0SR = 0;C0XR=0;
C0XR |=(1<<C0OE); // C0OE[7] = 1, выход компаратора AC0 для внешнего порта PD2
// ВЫБОР ИНВЕРСНОГО ВХОДА
ADCSRB = 0b01000000;// ADMUX
/*
CME01[7] CME00[6] Источник входного сигнала AC0
0 0 ACXN
0 1 ADMUX
1 0 DFFO
*/
ADMUX = 0b00000000; // CHMUX[3:0] = 0000 Источник входного сигнала PC0 (A0)
// ВЫБОР НЕИНВЕРСНОГО ВХОДА
C0SR &=~(1<<C0BG);C0XR &=~(1<<C0PS0);
/*
C0BG C0PS0 Источник входного сигнала AC0
0 0 AC0P
0 1 ACXP
1 0 DAO
*/
delay(100);
}
void loop() {
float l_iz = 1/(4*3.14*3.14*f_out*f_out*CAP*pow(10,-12))*1000000.0;
if(l_iz>100000||l_iz<0){l_iz=0;}
Serial.print(l_iz,2);Serial.println(" uH");
Serial.print(f_out);Serial.println(" Hz");
u8g.firstPage(); do {
u8g.setFont(u8g_font_profont29r);u8g.setPrintPos(0,25);
if(l_iz<1000){u8g.print(l_iz,2);u8g.drawStr(97,25,"uH");}
if(l_iz>=1000){u8g.print(l_iz/1000,2);u8g.drawStr(97,25,"mH");}
}while( u8g.nextPage() );
delay(1000);
}
ISR(TIMER1_OVF_vect) {tic++;}
ISR(TIMER3_vect) {
if (TIFR3 & (1 << OCF3A)){
TIFR3 = 1 << OCF3A;
f_out = tic*0xFFFF + TCNT1;
tic=0;TCNT1=0;
}} 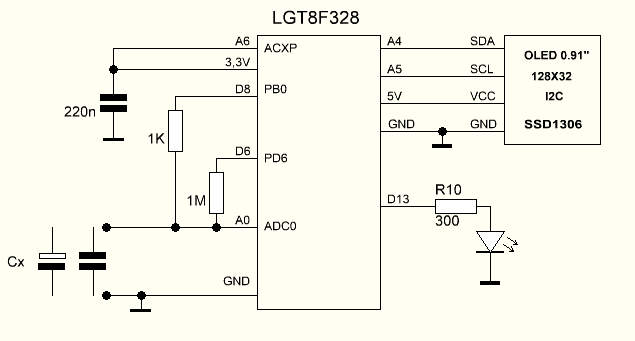
#define CALL_UF 6.10
#define CALL_NF 6.58
#include <Wire.h>
#include <U8glib.h> // https://github.com/olikraus/u8glib/
//U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE|U8G_I2C_OPT_DEV_0);
U8GLIB_SSD1306_128X32 u8g(U8G_I2C_OPT_NONE); // I2C / TWI
volatile int x;
float null_c;
bool mk;
unsigned long c_f,times0,times1;
void setup() {
Serial.begin(9600);
Wire.begin();
PORTB |=(1<<PB5);
// TIMER_1 /////////////////////////
TCNT1 = 0;TCCR1A = 0;TCCR1C = 0;TCCR1B = 2;TIMSK1 |= (1 << TOIE1);
// COMPARATOR_0 ////////////////////
C0SR = 0;C0XR=0;ADMUX=0;ADCSRB=0;
ADCSRB = 0b01000000;// ADMUX
ADMUX = 0b00000000; // A0 A1 A2
C0SR &=~(1<<C0BG);C0XR |=(1<<C0PS0);// ACXP
// ADC ////////////////////////////
ADCSRD |= (1<<REFS2); // 4.096 ИОН
ADCSRA |= 1 << ADEN | 1 << ADSC | 1 << ADATE | 0b111;
delay(200);
PORTB |=(1<<PB0);DDRB &=~ (1<<PB0);
DDRD |=(1<<PD6);PORTD &=~ (1<<PD6);delay(300);
DDRB &=~ (1<<PB0);PORTB &=~(1<<PB0);
times1=millis();
while(analogRead(A0)>10);
delay(100);
TCNT1=0;x=0;PORTD |= (1<<PD6);
while(((C0SR >> 5) & 1)==1);null_c = (x * 65535 + TCNT1)/CALL_NF;
u8g.firstPage(); do {u8g.setFont(u8g_font_profont17r);u8g.drawStr(20,11,"CALL_0");
u8g.setPrintPos(20,28);u8g.print(null_c,1);u8g.drawStr(80,28,"pF");
} while( u8g.nextPage() );
delay(2000);
}
void loop() {
///// uF ////////////////////////////////////////////////
PORTD &=~(1<<PD6);DDRD &=~(1<<PD6);
DDRB |= (1<<PB0);PORTB &=~ (1<<PB0);delay(10);
while(analogRead(A0)>10);
TCNT1=0;x=0;PORTB |= (1<<PB0);
while(((C0SR >> 5) & 1)==1){c_f = x * 65535 + TCNT1;PORTB|=(1<<PB5);}
PORTB&=~(1<<PB5);
/////////////////////////////////////////////////////////
if((c_f/CALL_UF)/1000.0<0.3){mk=1;}else{mk=0;}
///// nF ////////////////////////////////////////////////
if(mk==1){
PORTB |=(1<<PB0);DDRB &=~ (1<<PB0);
DDRD |=(1<<PD6);PORTD &=~ (1<<PD6);delay(300);
DDRB &=~ (1<<PB0);PORTB &=~(1<<PB0);
times1=millis();
while(analogRead(A0)>10){if(millis()-times1>2000){mk=0;break;}};
delay(100);
TCNT1=0;x=0;PORTD |= (1<<PD6);
while(((C0SR >> 5) & 1)==1){PORTB|=(1<<PB5);if(x>50){mk=0;break;}}
PORTB&=~(1<<PB5);c_f = x * 65535 + TCNT1;
}
/////////////////////////////////////////////////////////
u8g.firstPage(); do {
u8g.setFont(u8g_font_profont29r);u8g.setPrintPos(0,25);
if(mk==1){
if((c_f/CALL_NF-null_c)<9999){
u8g.print(abs(c_f/CALL_NF-null_c),0);u8g.drawStr(100,25,"pF");
}else{
u8g.print((c_f/CALL_NF-null_c)/1000.0,2);u8g.drawStr(100,25,"nF");}
}
if(mk==0){
if((c_f/CALL_UF)/1000.0<9.99){
u8g.print((c_f/CALL_UF)/1000.0,2);u8g.drawStr(100,25,"uF");
}else{
u8g.print((c_f/CALL_UF)/1000.0,1);u8g.drawStr(100,25,"uF");
}
}
} while( u8g.nextPage() );
Serial.println((c_f/CALL_UF)/1000.0);
}
ISR(TIMER1_OVF_vect){x++;}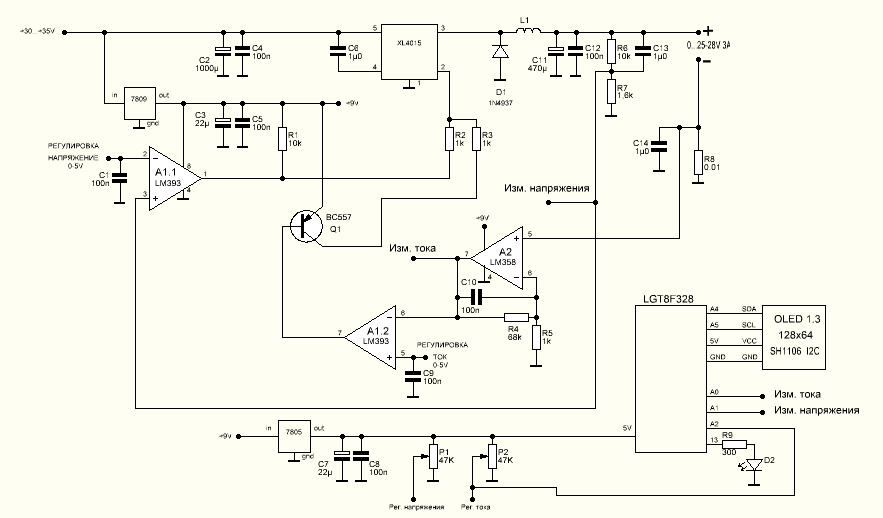
#define KALL_I_IZ 1.200
#define KALL_U_IZ 0.730
#include <Wire.h>
#include <U8glib.h> // https://github.com/olikraus/u8glib/
U8GLIB_SH1106_128X64 u8g(U8G_I2C_OPT_DEV_0|U8G_I2C_OPT_FAST);
int n,m,m1;
float i_dig,u_dig,i_dig1;
float u_iz,i_iz,i_iz1;
long i_sum,u_sum,i_sum1;
bool w=1;
void setup(){
delay(200);
Wire.begin();
analogReadResolution(12);// АЦП 12 БИТ
analogReference(DEFAULT);
pinMode(A0,INPUT);
pinMode(A1,INPUT);
pinMode(A2,INPUT);
pinMode(13,OUTPUT);
u8g.firstPage();
do {
u8g.setFont(u8g_font_profont12r);
u8g.drawStr(30,10,"POWER SUPPLY");
u8g.drawStr(30,25,"0-30V 0-3A");
u8g.drawStr(30,55,"rcl-radio.ru");
} while( u8g.nextPage() );
delay(2000);
}
void loop(){
i_dig = analogRead(A0);
i_sum = i_sum+i_dig;
n++;if(n>9){n=0;i_iz=i_sum/10;i_sum=0;}
u_dig = analogRead(A1);
u_sum = u_sum+u_dig;
m++;if(m>9){m=0;u_iz=u_sum/10;u_sum=0;w=1;}
i_dig1 = analogRead(A2);
i_sum1 = i_sum1+i_dig1;
m1++;if(m1>9){m1=0;i_iz1=i_sum1/10;i_sum1=0;}
if(i_iz*1.05>=i_iz1){digitalWrite(13,HIGH);}else{digitalWrite(13,LOW);}
if(w==1){
u8g.firstPage();
do {
u8g.drawLine(0, 26, 128, 26);u8g.drawLine(0, 53, 128, 53);
u8g.setFont(u8g_font_profont29r);
u8g.drawStr(0,22,"U");u8g.setPrintPos(35, 22);u8g.print(u_iz*KALL_U_IZ/100.0,1);u8g.drawStr(110,22,"V");
u8g.drawStr(0,50,"I");u8g.setPrintPos(35, 50);u8g.print(i_iz*KALL_I_IZ/1000.0,2);u8g.drawStr(110,50,"A");
u8g.setFont(u8g_font_profont12r);
u8g.setPrintPos(75, 64);u8g.print(i_iz1*KALL_I_IZ/1000.0,2);
u8g.drawStr(15,64,"I stab = ");u8g.drawStr(105,64,"A");
} while( u8g.nextPage() );
}
} Основная статья - http://rcl-radio.ru/?p=131662

#define STB 4
#define DIN 2
#define CLK 3
#define SET 5
#define UP 6
#define DW 7
#include <Wire.h>
#include <DS3231.h> // http://rcl-radio.ru/wp-content/uploads/2022/10/DS3231.zip
DS3231 clock;RTCDateTime DateTime;
int a[5];
int hour,minut,set;
long times,times0;
bool d,mig;
void setup(){
Serial.begin(9600);clock.begin();
///clock.setDateTime(__DATE__, __TIME__); // Устанавливаем время на часах, основываясь на времени компиляции скетча
pinMode(STB,OUTPUT);
pinMode(DIN,OUTPUT);
pinMode(CLK,OUTPUT);
pinMode(SET,INPUT_PULLUP);
pinMode(UP,INPUT_PULLUP);
pinMode(DW,INPUT_PULLUP);
delay(100);
digitalWrite(STB,HIGH);delay(200);
// PWM OUTPUT D9 TIMER 1
TCCR1A = 0;TCCR1B = 0;
TCCR1A = (1 << COM1A1)|(1 << WGM11);
TCCR1B = (1 << WGM13)|(1 << WGM12)|(1 << CS10);
DDRB = 1 << DDB1; // OUTPUT PWM (OCR1A)
OCR1A = 15;
ICR1 = 40;
write_byte1_PT6312(0b01000100);// command 2
write_byte1_PT6312(0b00000100);// command 1 8dig/14seg
write_byte1_PT6312(0b10001111);// command 4 display on
}
void loop(){
DateTime = clock.getDateTime();
hour = DateTime.hour;
minut = DateTime.minute;
if(digitalRead(SET)==LOW){set++;if(set>2){set=0;} delay(300);}
if(digitalRead(UP)==LOW&&set==1){hour++;if(hour>23){hour=23;} clock.setDateTime(2024, 2, 22, hour, minut, 0);delay(100);}
if(digitalRead(DW)==LOW&&set==1){hour--;if(hour<0){hour=0;} clock.setDateTime(2024, 2, 22, hour, minut, 0);delay(100);}
if(digitalRead(UP)==LOW&&set==2){minut++;if(minut>59){minut=59;} clock.setDateTime(2024, 2, 22, hour, minut, 0);delay(100);}
if(digitalRead(DW)==LOW&&set==2){minut--;if(minut<0){minut=0;} clock.setDateTime(2024, 2, 22, hour, minut, 0);delay(100);}
if(millis()-times0<200){mig=1;}
if(millis()-times0>200){mig=0;}
if(millis()-times0>400){times0=millis();}
if(millis()-times<500){d=1;}
if(millis()-times>500){d=0;}
if(millis()-times>1000){times=millis();}
if(set==0){
a[0]=minut%10;
a[1]=minut/10%10;
a[2]=hour%10;
a[3]=hour/10%10;}
if(set!=2){a[0]=minut%10;}
if(set!=2){a[1]=minut/10%10;}
if(set==2&&mig==0){a[0]=minut%10;}
if(set==2&&mig==0){a[1]=minut/10%10;}
if(set==2&&mig==1){a[0]=10;}
if(set==2&&mig==1){a[1]=10;}
if(set!=1){a[2]=hour%10;}
if(set!=1){a[3]=hour/10%10;}
if(set==1&&mig==0){a[2]=hour%10;}
if(set==1&&mig==0){a[3]=hour/10%10;}
if(set==1&&mig==1){a[2]=10;}
if(set==1&&mig==1){a[3]=10;}
//dp g f e d c b a
write_byte2_PT6312(0b11000000,seg(a[0],0));//GR1
write_byte2_PT6312(0b11000010,seg(a[1],0));//GR2
write_byte2_PT6312(0b11000100,seg(a[2],0));//GR3
write_byte2_PT6312(0b11000110,seg(a[3],0));//GR4
write_byte2_PT6312(0b11001000,seg(0,d));//GR5
delay(100);
}
byte seg(int a, bool dp){
byte segm;
switch(a){
case 0: segm=0b00111111+(dp<<7);break;
case 1: segm=0b00000110+(dp<<7);break;
case 2: segm=0b01011011+(dp<<7);break;
case 3: segm=0b01001111+(dp<<7);break;
case 4: segm=0b01100110+(dp<<7);break;
case 5: segm=0b01101101+(dp<<7);break;
case 6: segm=0b01111101+(dp<<7);break;
case 7: segm=0b00000111+(dp<<7);break;
case 8: segm=0b01111111+(dp<<7);break;
case 9: segm=0b01101111+(dp<<7);break;
case 10:segm=0b00000000;break;// пусто
case 11:segm=0b01000000;break;// -
case 12:segm=0b01100011;break;// градус
case 13:segm=0b00111001;break;// С
}
return segm;
}
void write_byte1_PT6312(byte data){
digitalWrite(STB,LOW);
for(int i = 0; i <= 7; i++){
digitalWrite(CLK,LOW);
digitalWrite(DIN, (data >> i) & 1);
digitalWrite(CLK,HIGH);
}
digitalWrite(STB,HIGH);delay(1);
}
void write_byte2_PT6312(byte reg, byte data){
digitalWrite(STB,LOW);
for(int i = 0; i <= 7; i++){
digitalWrite(CLK,LOW);
digitalWrite(DIN, (reg >> i) & 1);
digitalWrite(CLK,HIGH);
}
delay(1);
for(int i = 0; i <= 7; i++){
digitalWrite(CLK,LOW);
digitalWrite(DIN, (data >> i) & 1);
digitalWrite(CLK,HIGH);
}
digitalWrite(STB,HIGH);delay(1);
}